Machine Learning¶
resources¶
training techniques¶
gradient accumulation¶
to avoid CUDA out of memory problem
e.g. batch size = 8 -> batch size = 2 but accumulate 4 iterations before optimizing
for at each iteration
loss /= accum_iter
if ((batch_idx + 1) % accum_iter == 0) or (batch_idx + 1 == len(data_loader)):
optimizer.step()
optimizer.zero_grad()
https://kozodoi.me/python/deep%20learning/pytorch/tutorial/2021/02/19/gradient-accumulation.html
intro¶
- gradient decsent
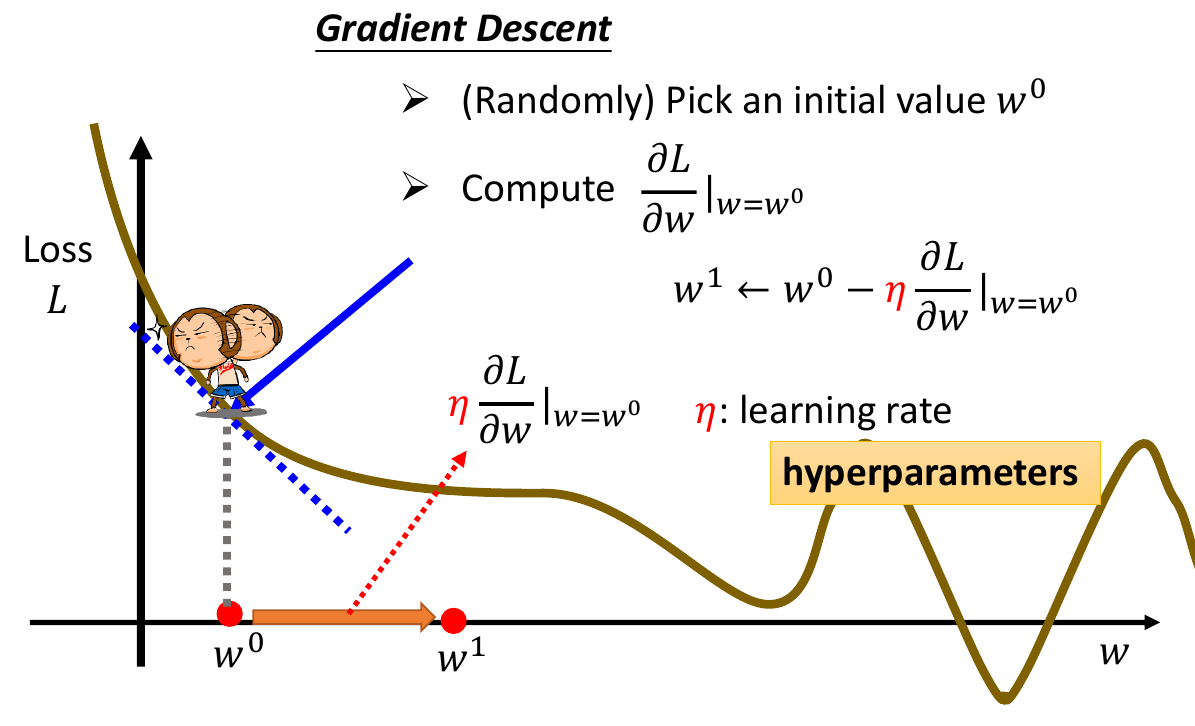
- 微分取斜率
- 往左/右走多少 depends on 斜率
- 卡在 critical point (微分 = 0)
- local minima or saddle point
- sigmoid function
- sigmoid(f(x)) = \(e^{f(x)}\)
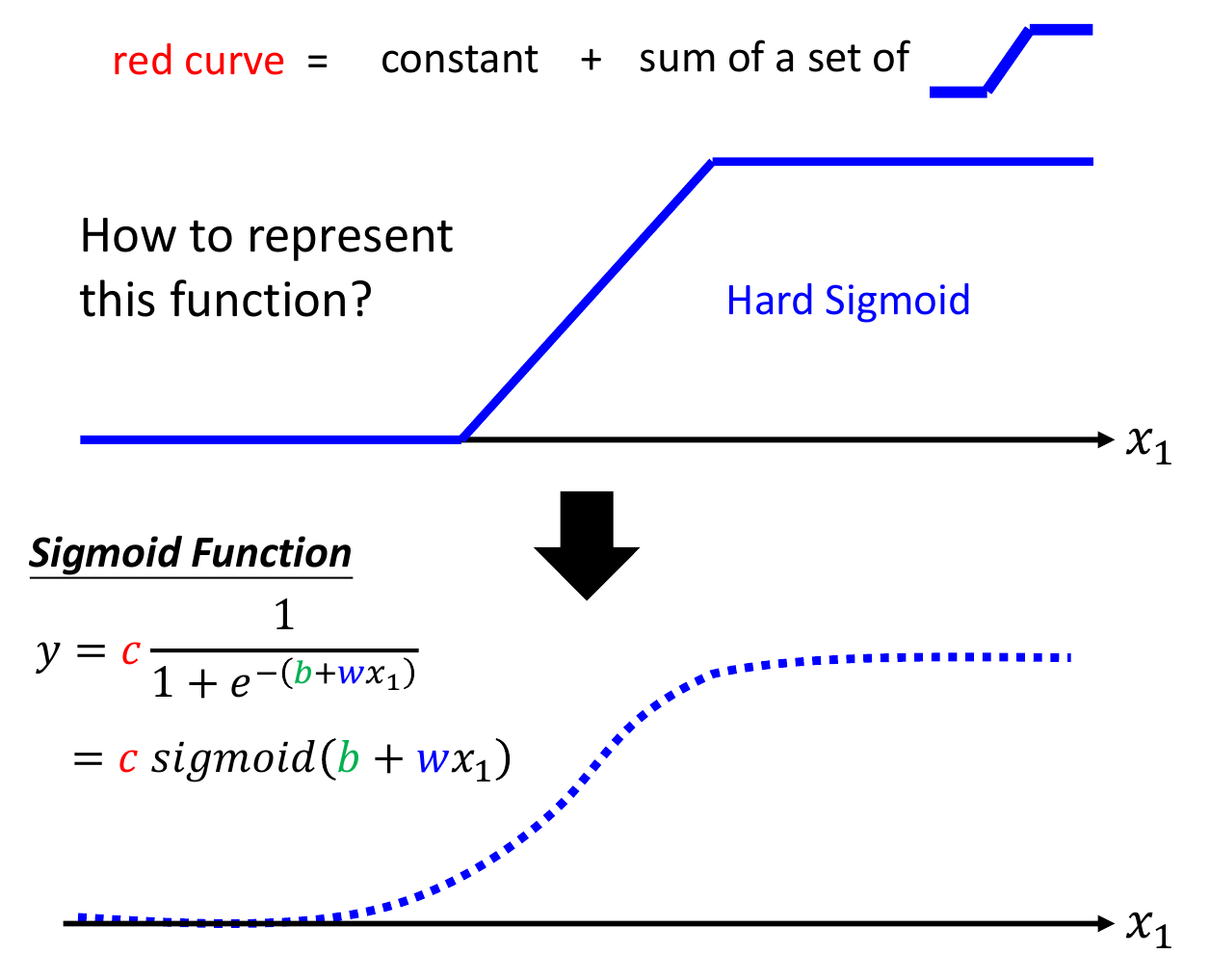
- 疊加一堆 sigmoid 逼近 function
- hyperparameter
- 你自己設的 parameter
- deep learning
- 堆很多層 ReLU
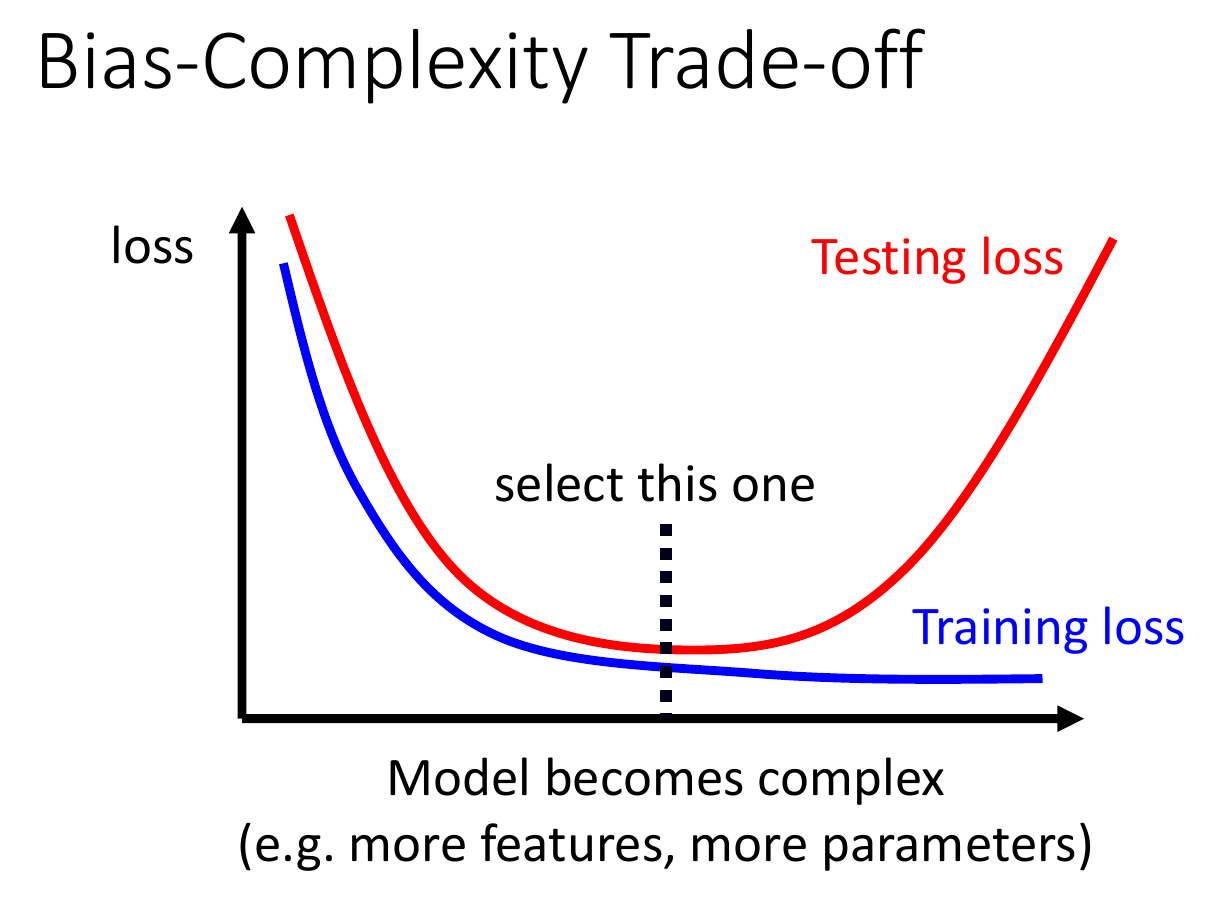
- 很多層 -> overfitting
general guidance¶
- improving your model
- training loss big
- deeper network has bigger loss
- optimization problem
- model bias
- make model bigger, more complex
- deeper network has bigger loss
- training loss small. testing loss big
- overfitting
- training loss big
overfitting¶
- to solve
- less parameters
- less features
- early stopping
- regularization
- dropout
- weight decay
- to limit the freedom of your model
critical point¶
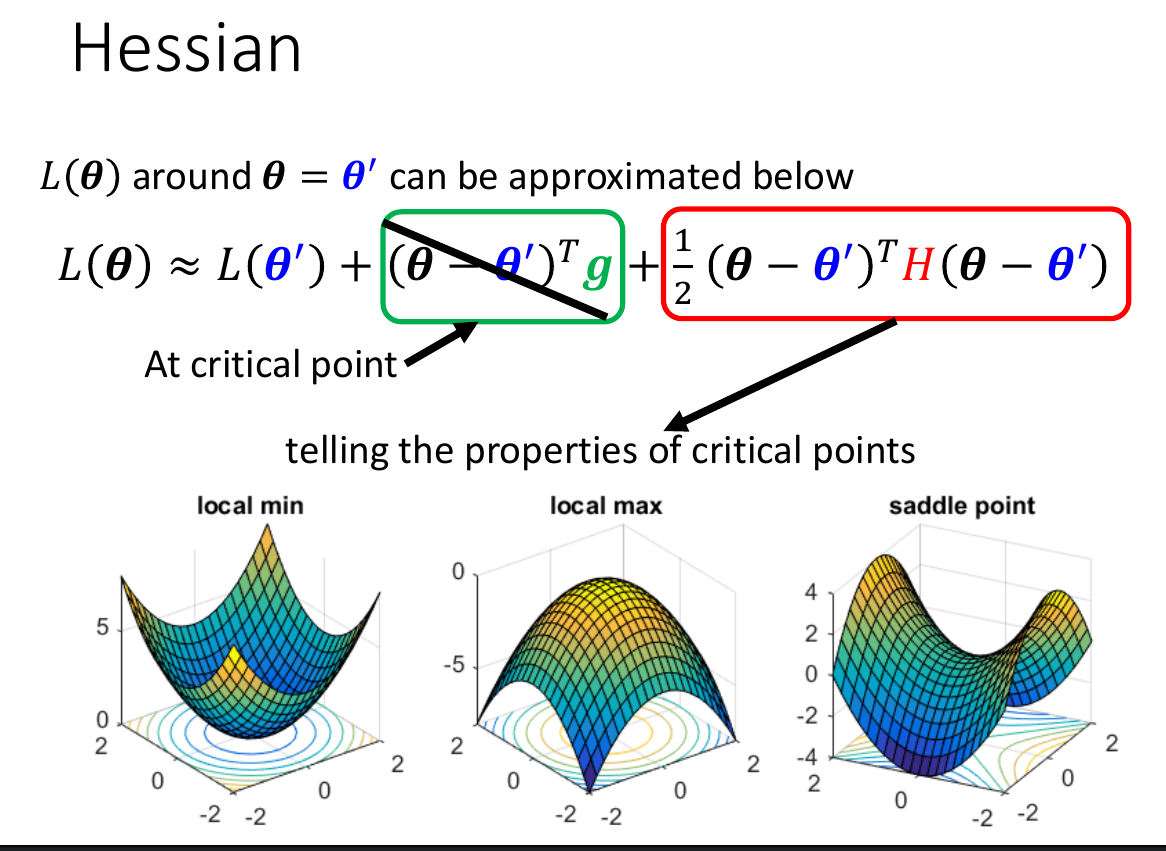
- eigen value all positive -> local minima
- eigen value all negatuve -> local maxima
- eigen value 有正有負 -> saddle points
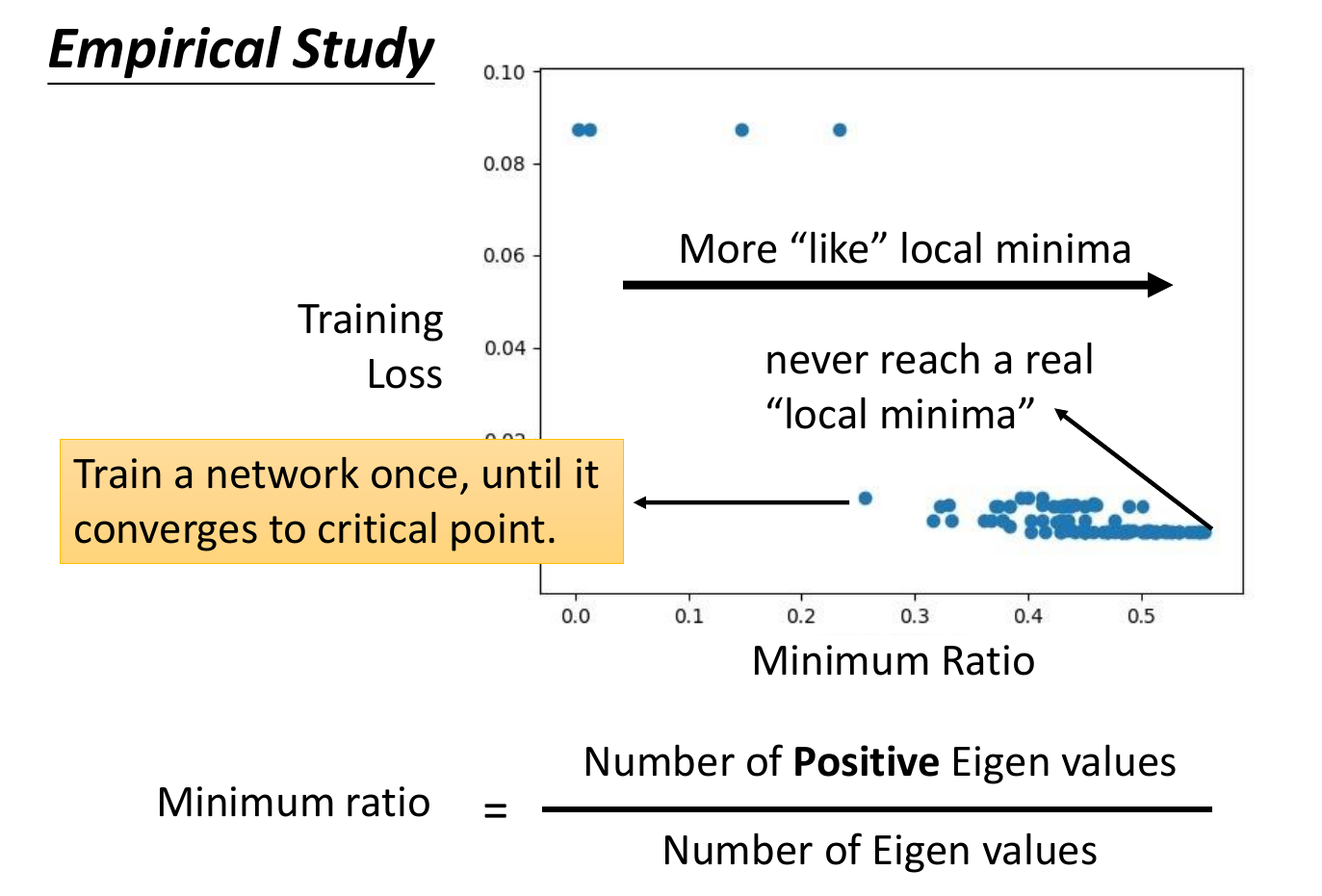 表示大部分時候都不是卡在 local minima,而是 saddle point
表示大部分時候都不是卡在 local minima,而是 saddle point
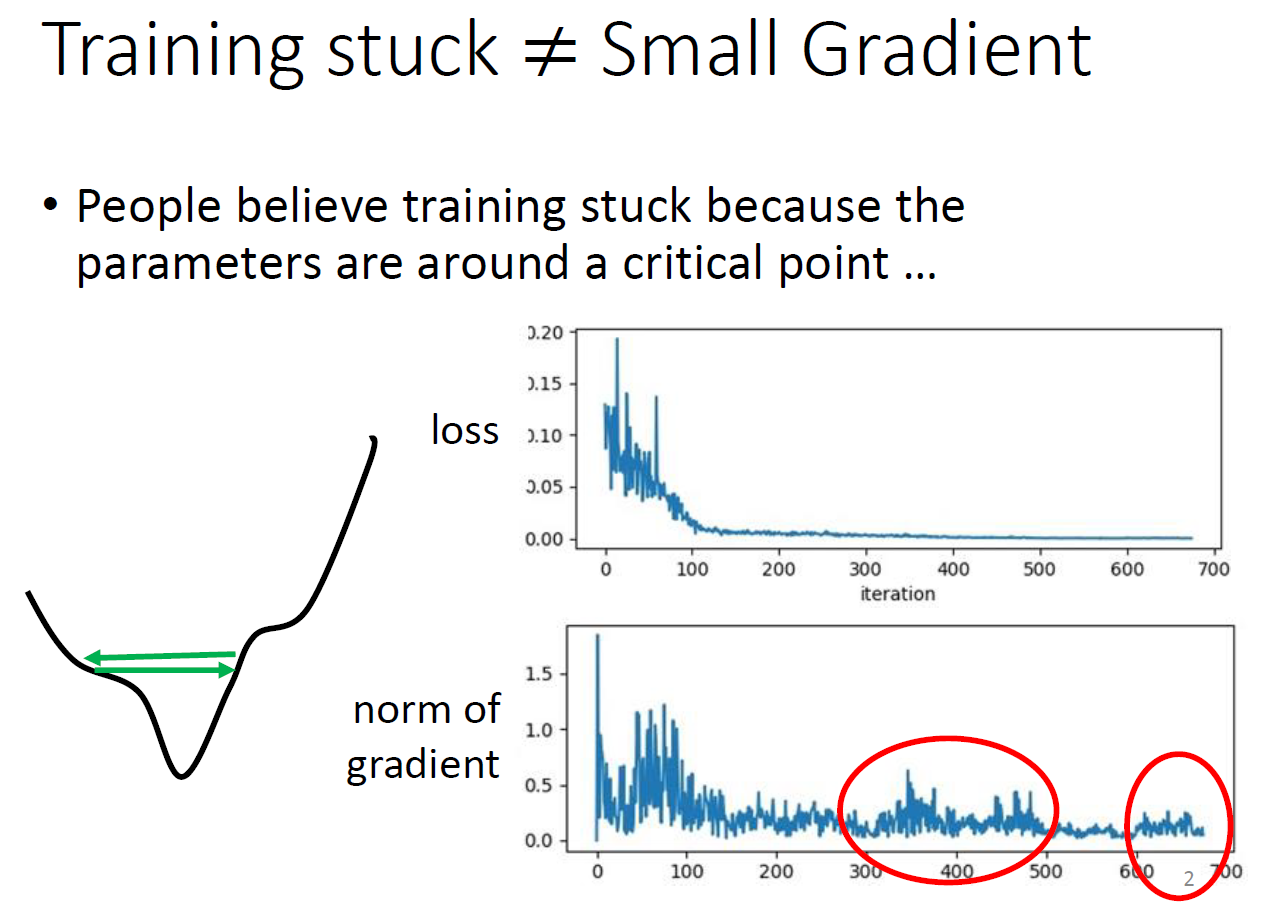
gradient descent 事實上很少卡在 critical point,而是在附近震盪
 要達到 critical point 要用特殊的方法
要達到 critical point 要用特殊的方法
batch¶
- epoch
- see all batches i.e. all data in a batch
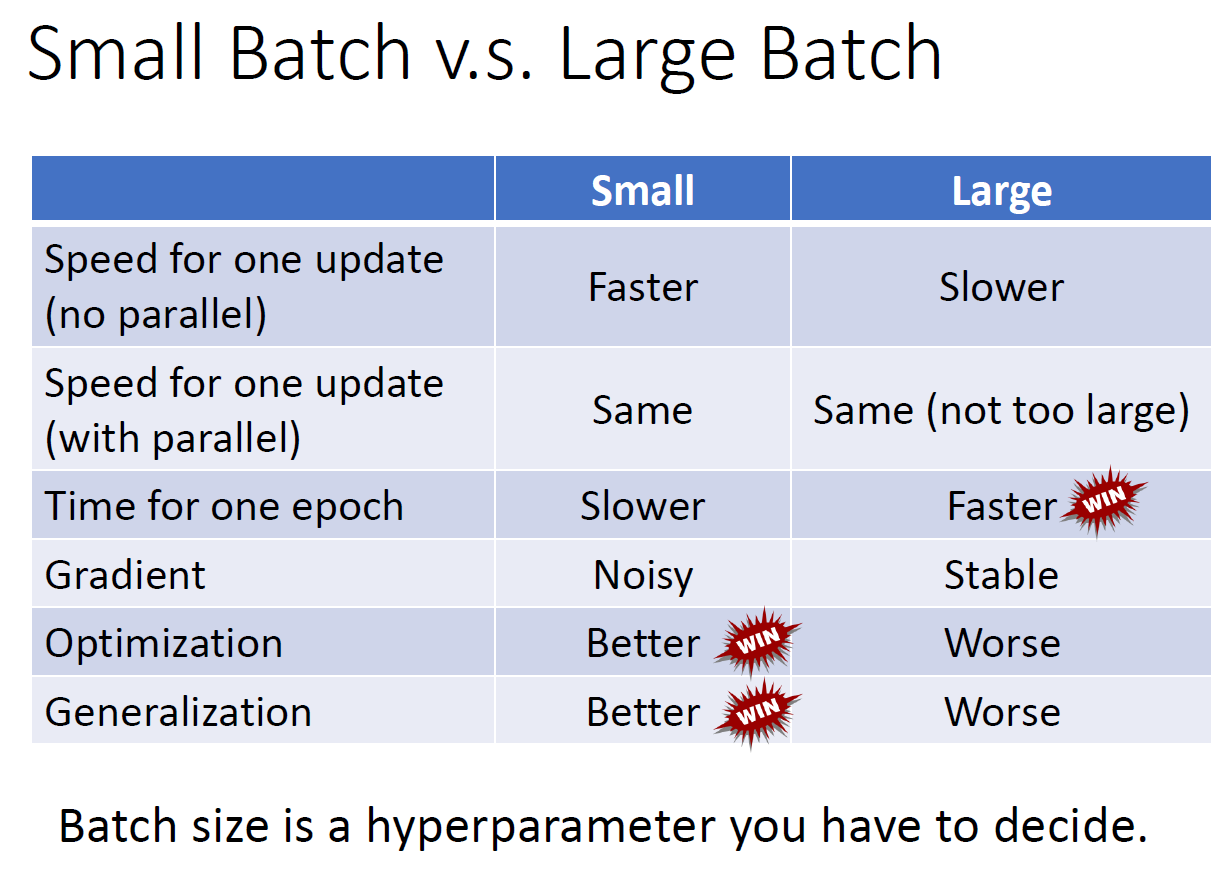
- small batch
- see few data in a batch
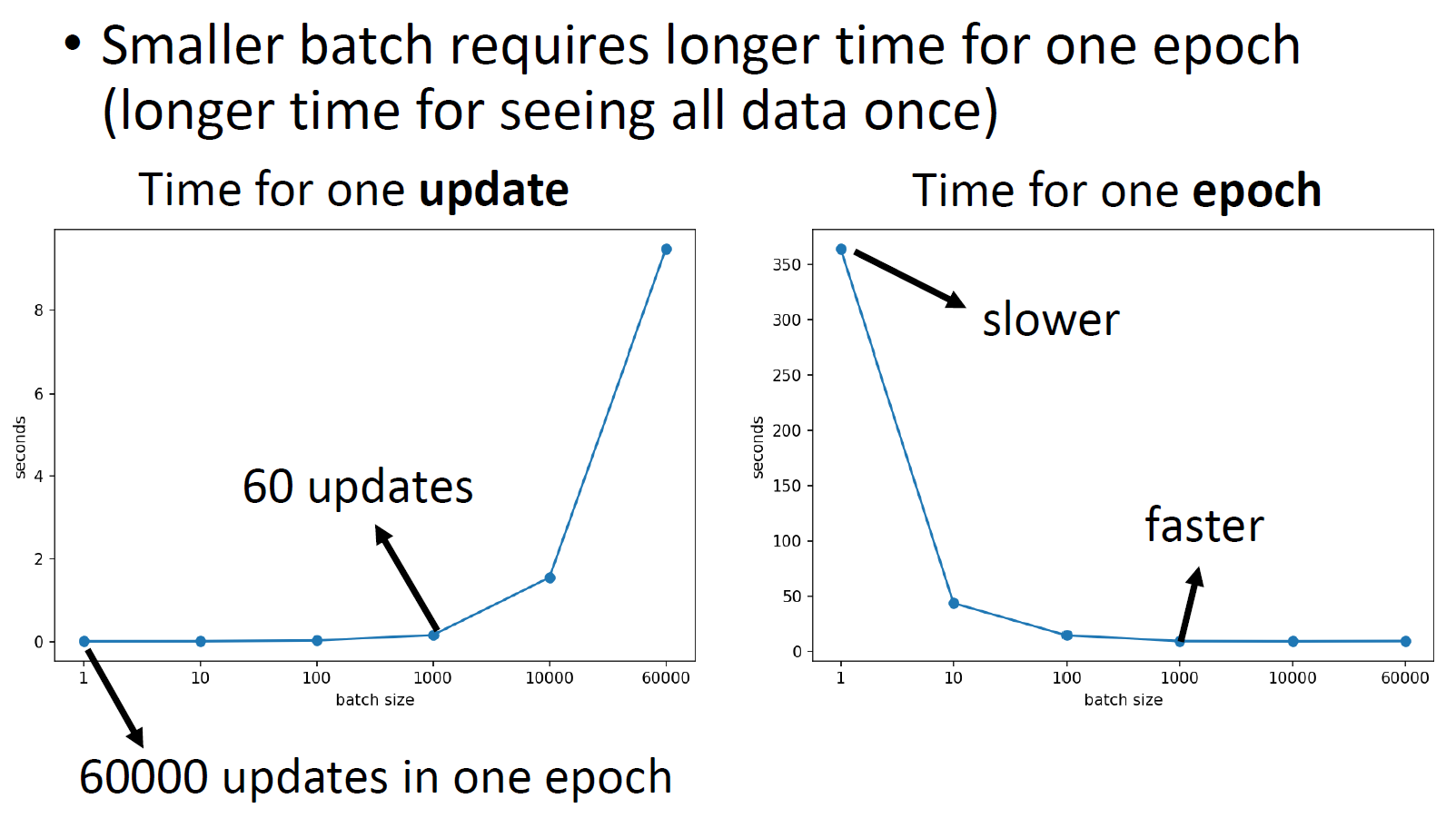
- more batch in an epoch
- can use parallel computing in a batch -> not necessarily bigger epoch time
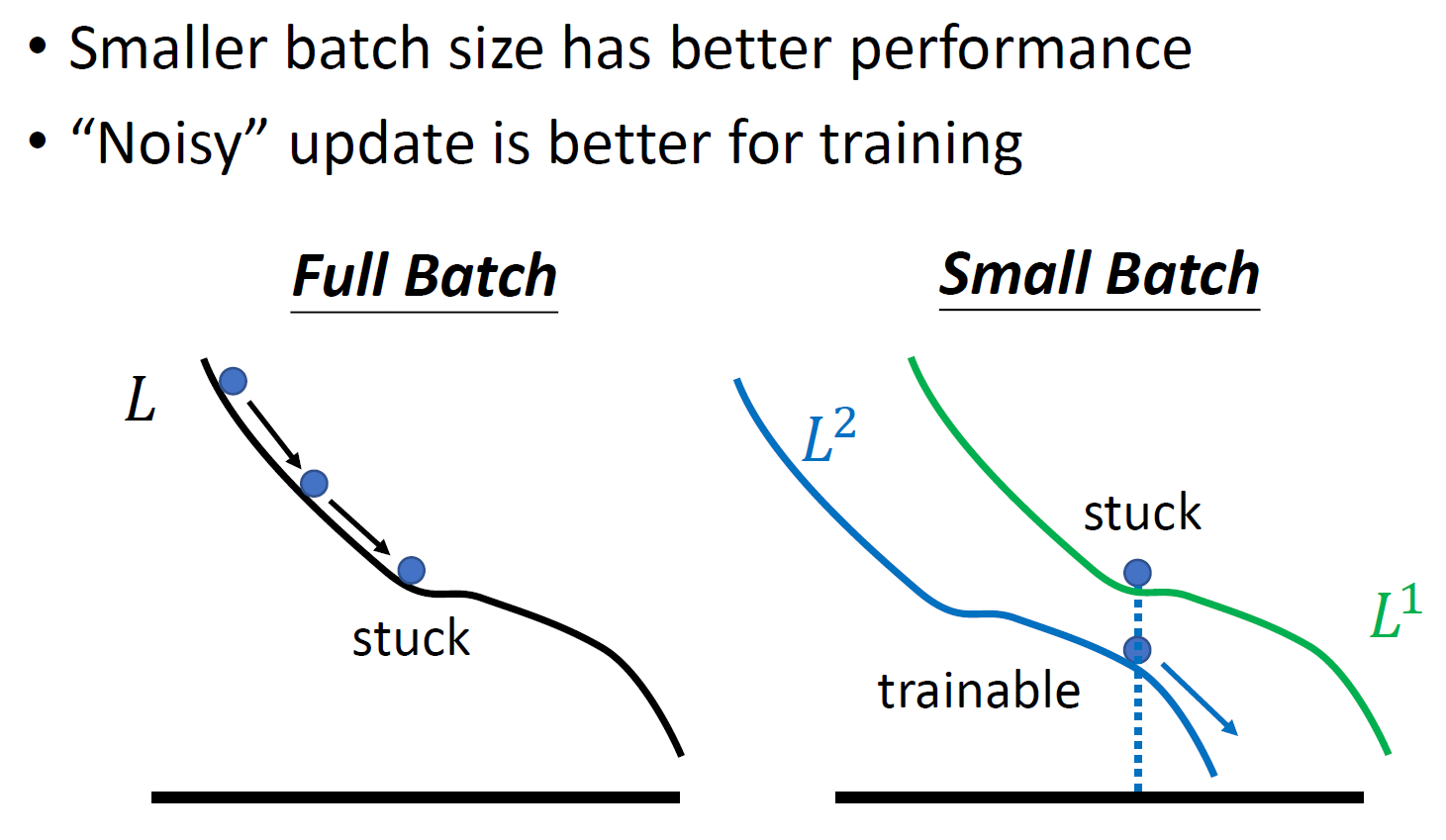
- updates more noisy
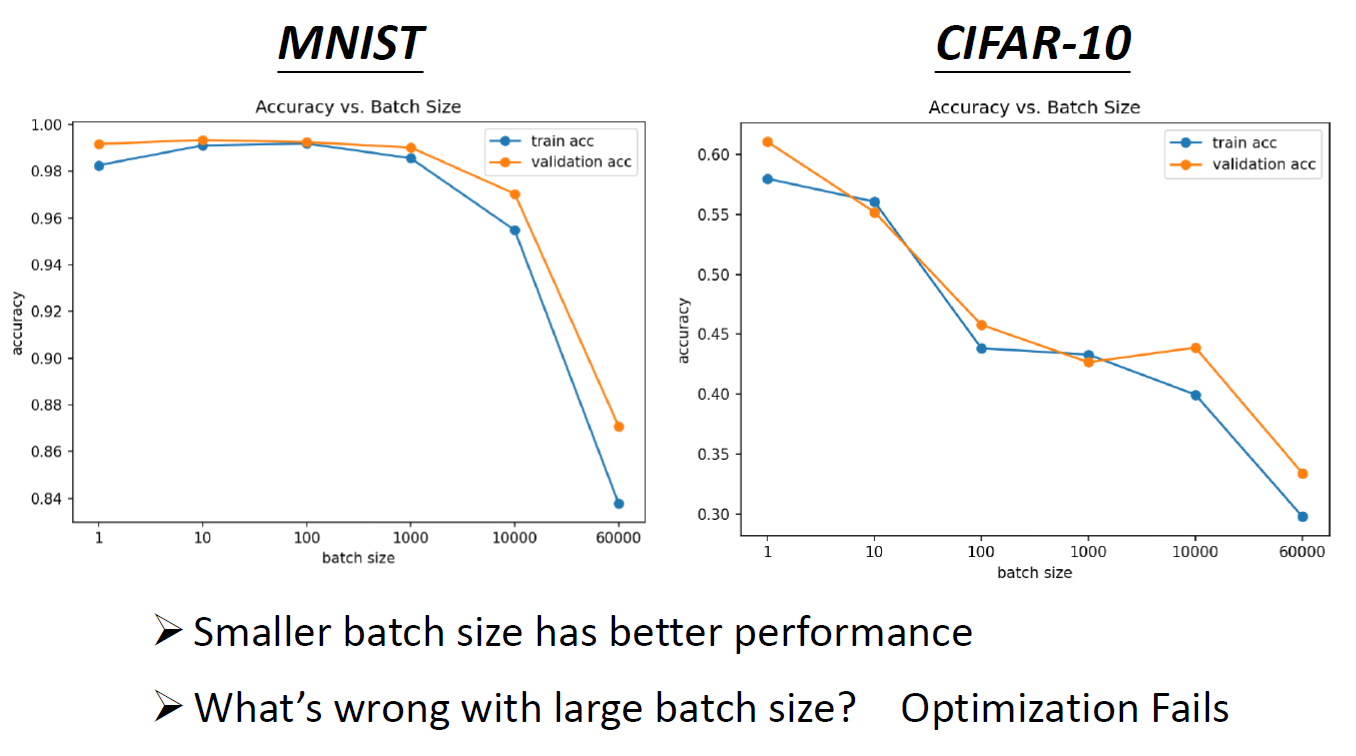
- loss function different for each batch -> more noisy -> less likely to fall into local minima -> better training accuracy
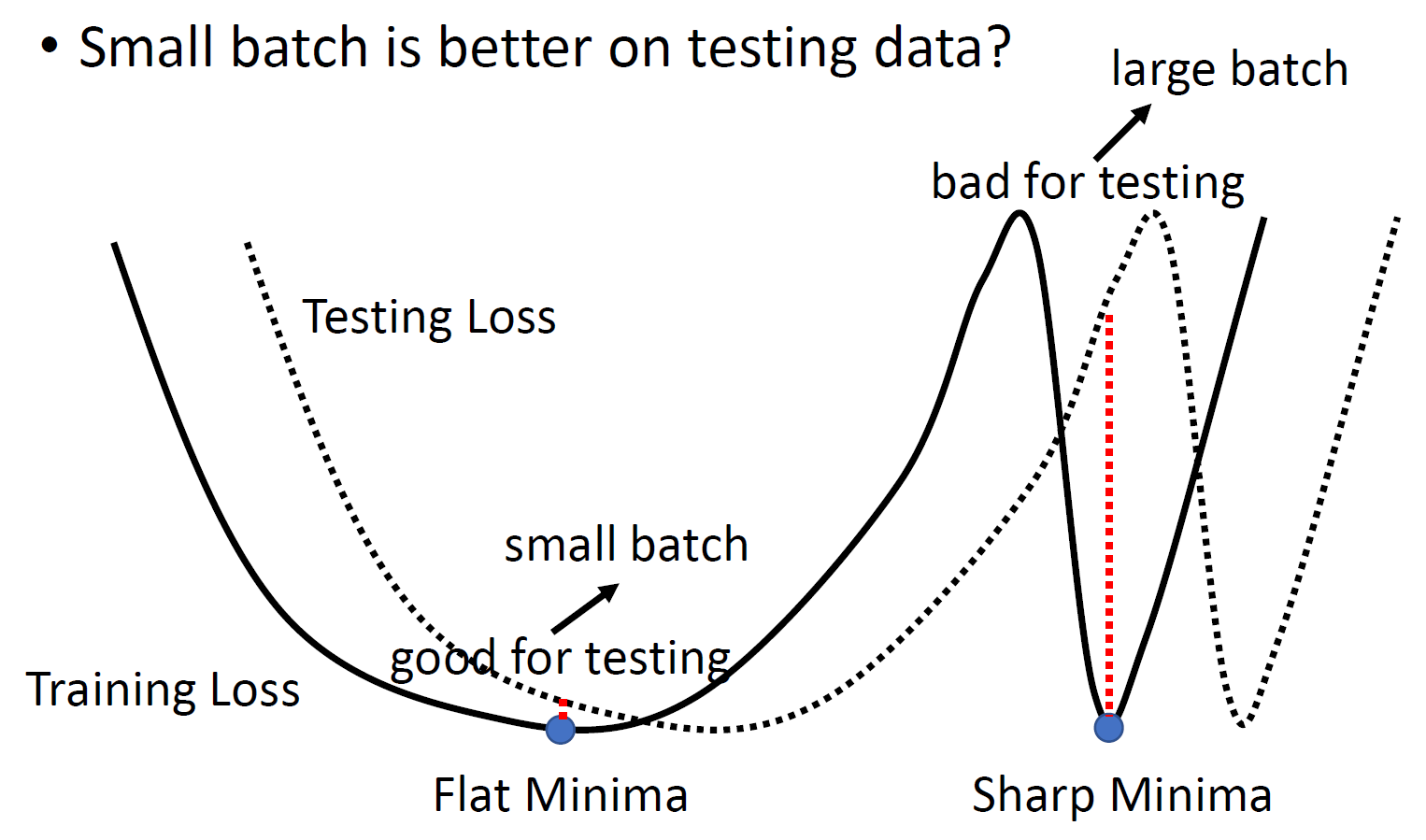
- tends to fall more in flat local minima than in sharp local minima -> better testing accuracy
- flat local minima is better than sharp local minima
- loss function different for each batch -> more noisy -> less likely to fall into local minima -> better training accuracy
- big batch
- see many data in a batch
- less batch in an epoch
- less epoch time
- less training accuracy
- less testing accuracy
- big batch size -> less epoch time
- big batch size -> less training accuracy
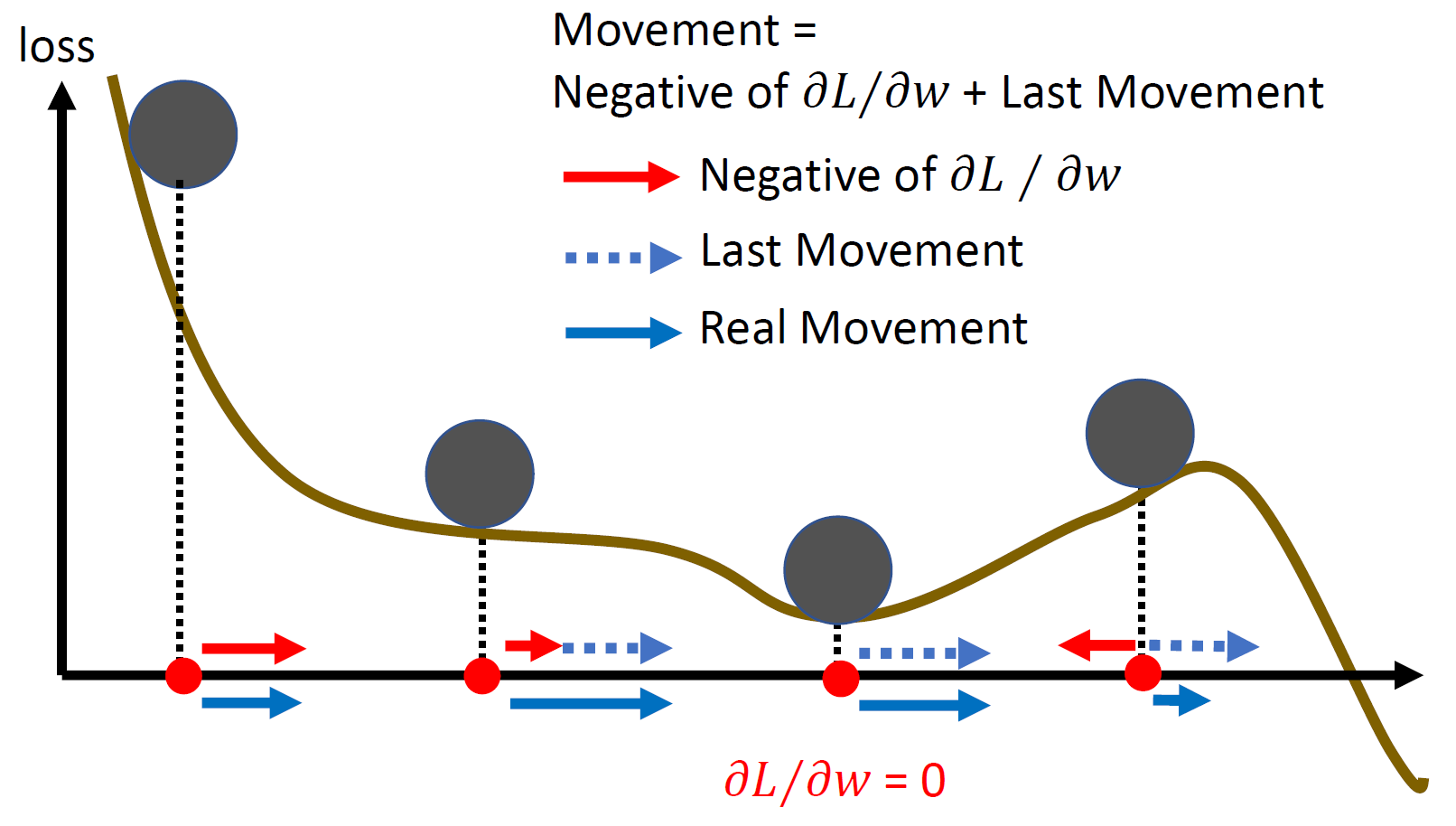
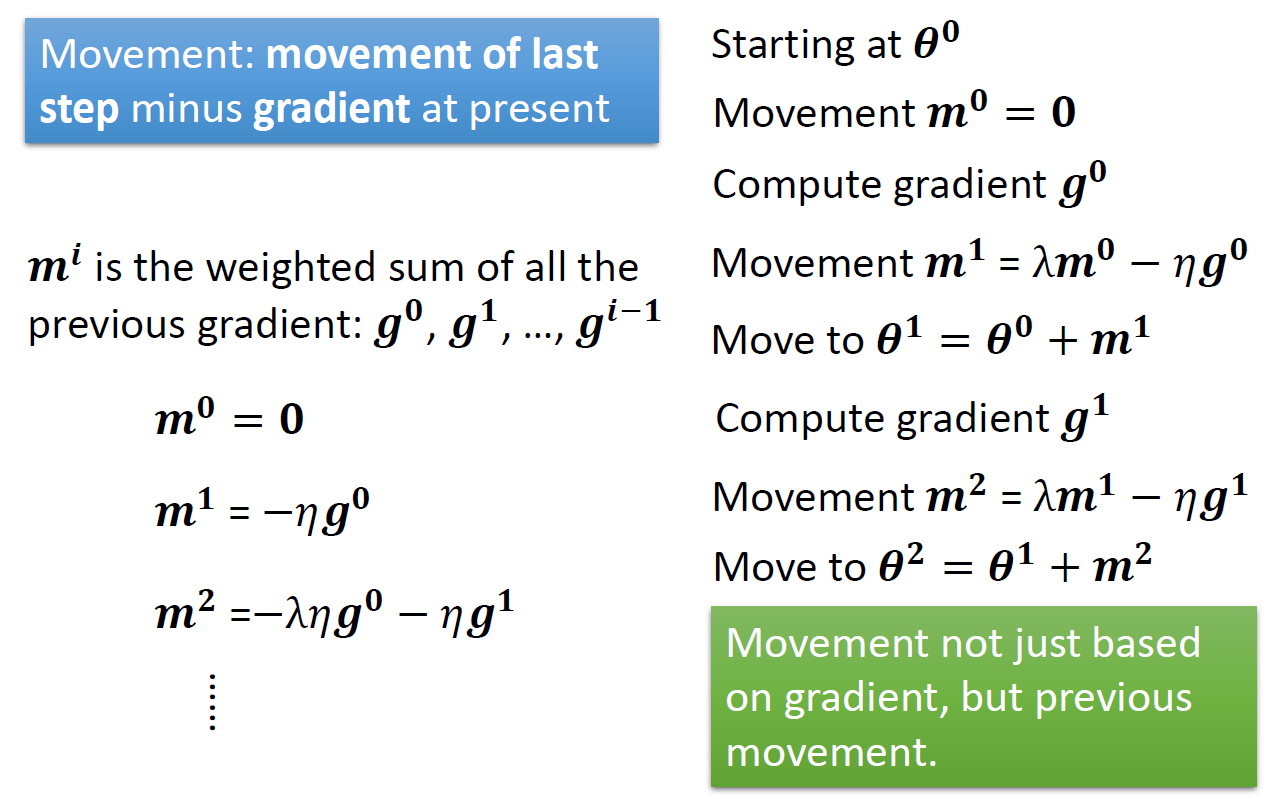
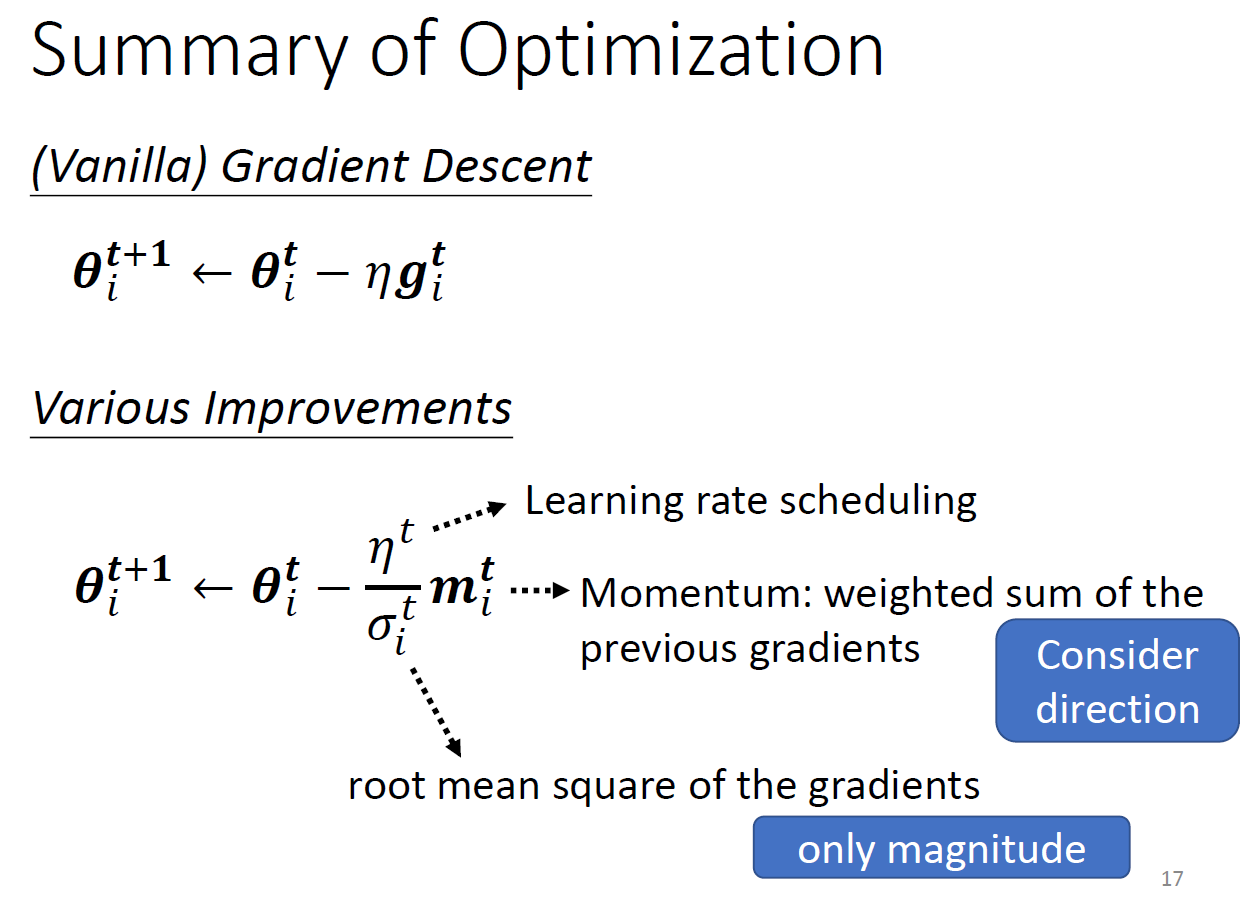
momemtum¶
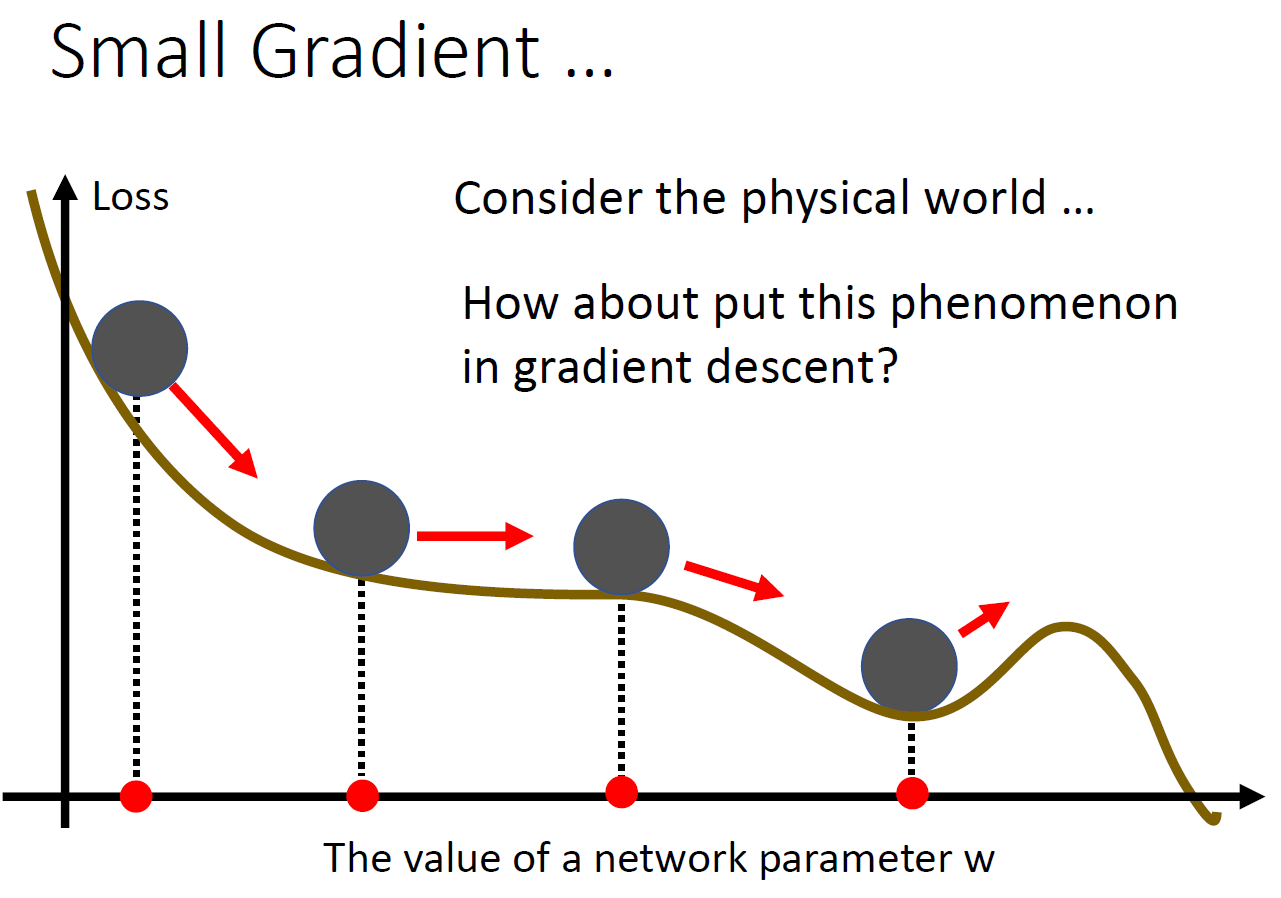
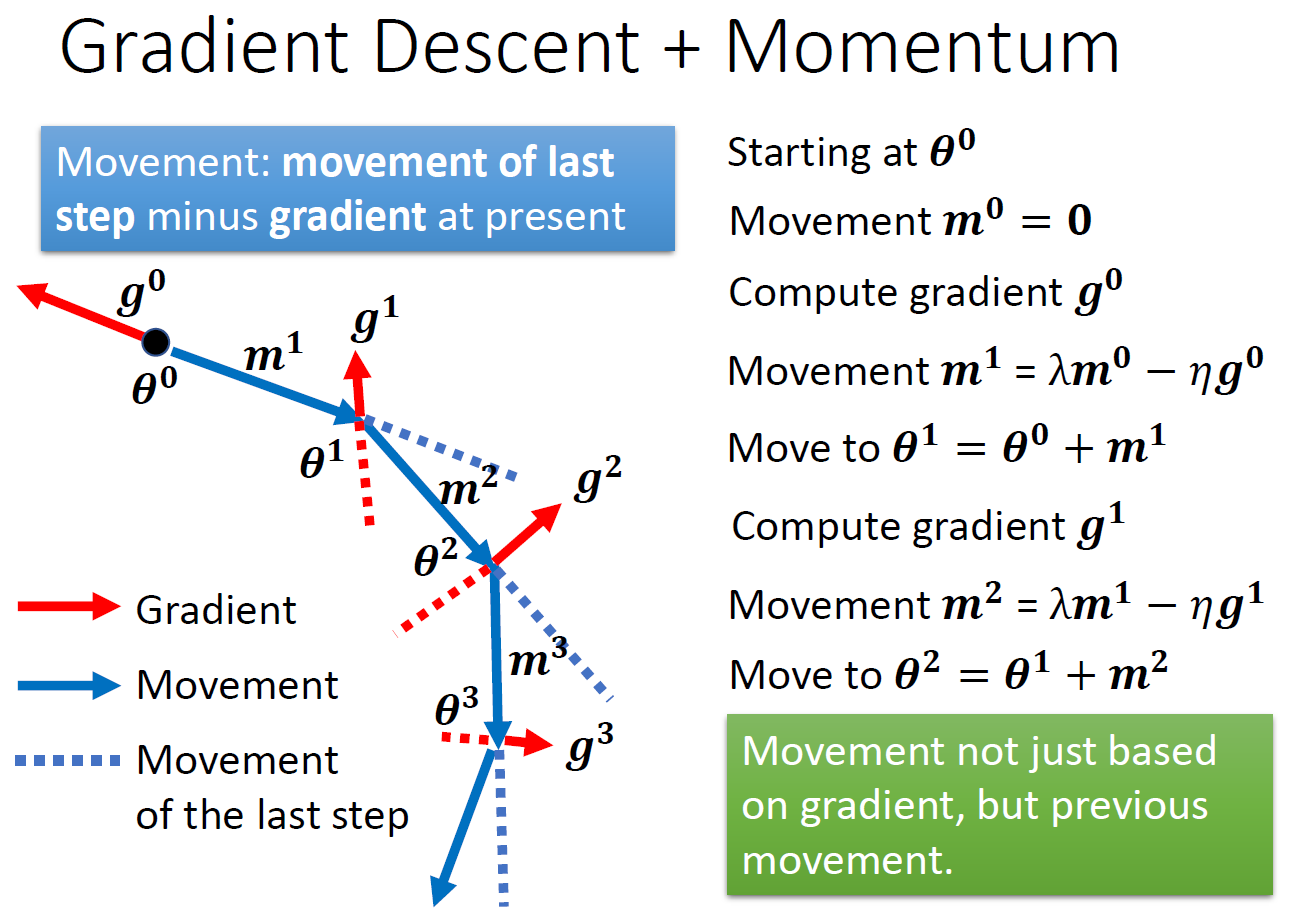
- momemtum = weighted sum of all previous gradients
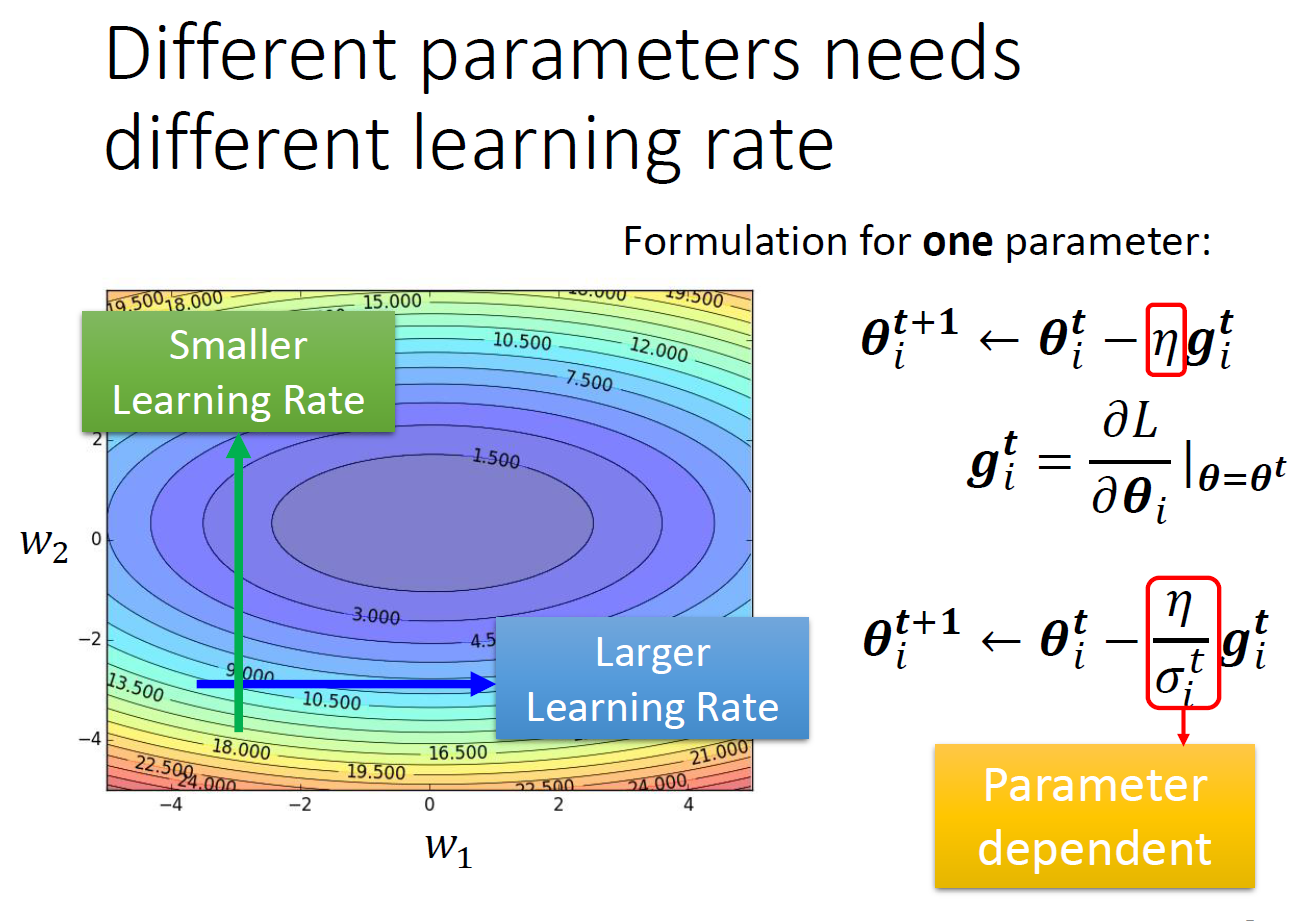
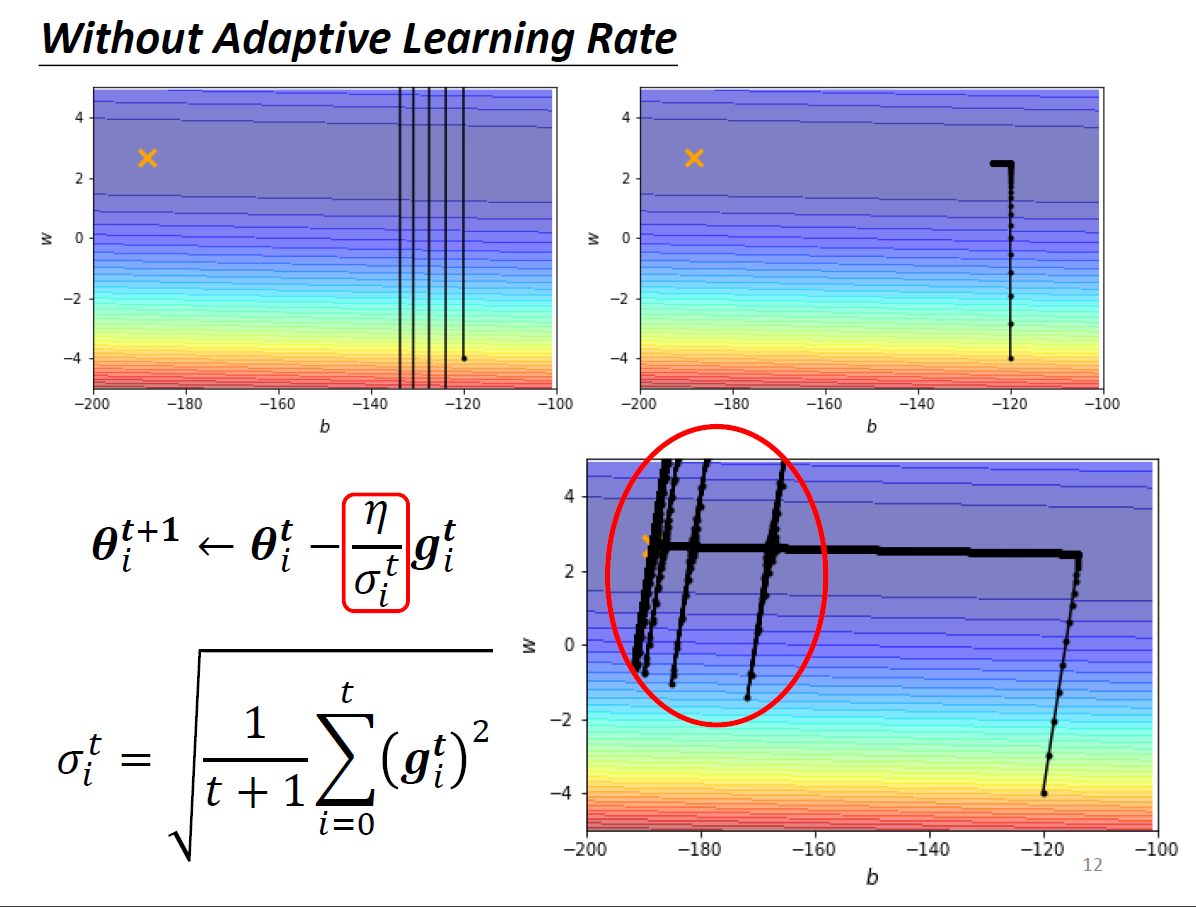
adaptive learning rate (optimization)¶
- learning rate = 步伐大小
- small slope -> big learning rate
- big slope -> small learning rate
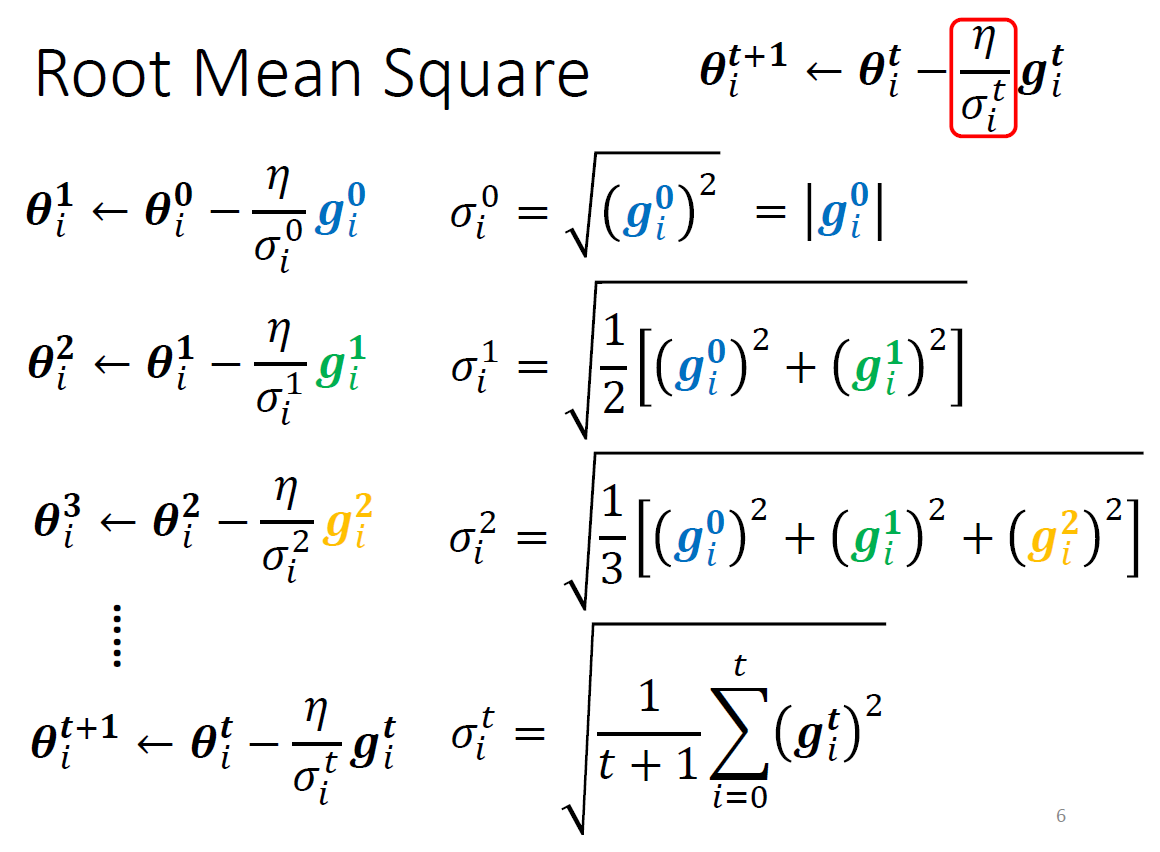
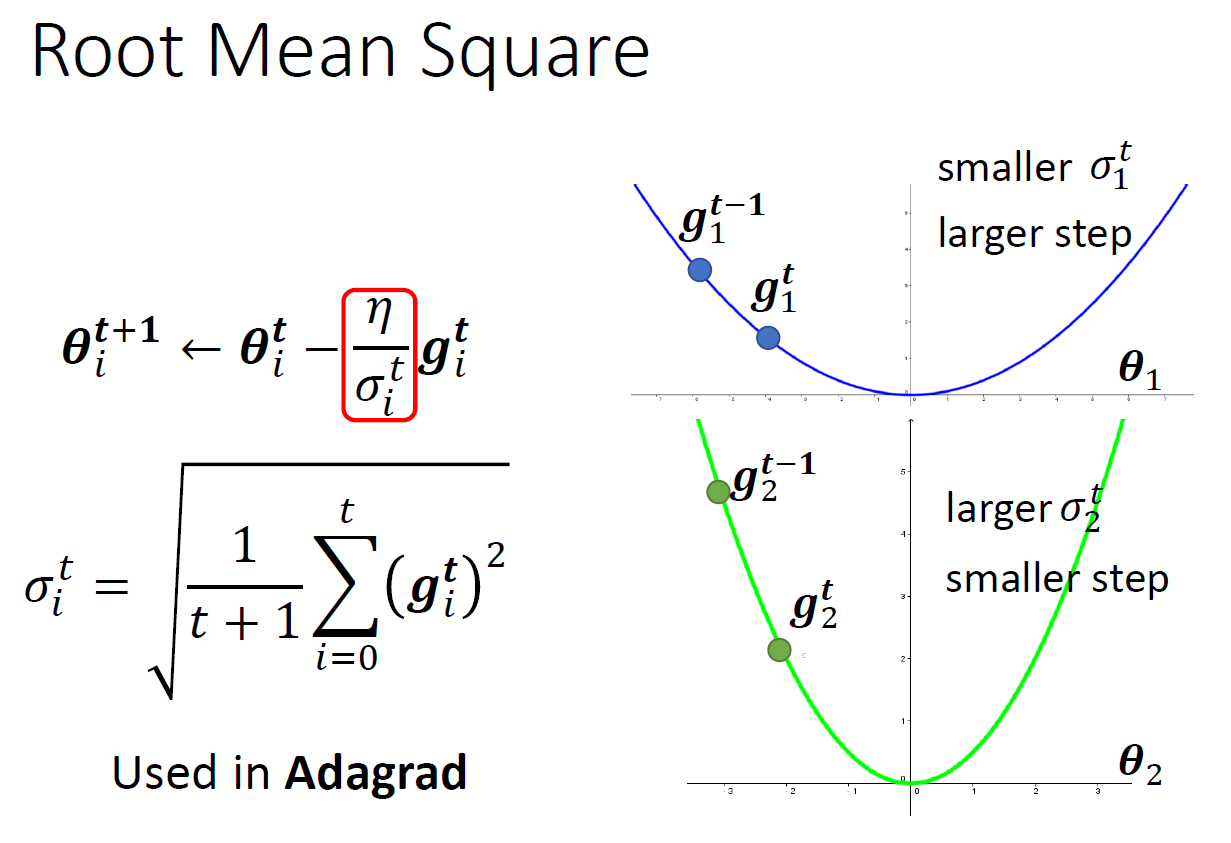
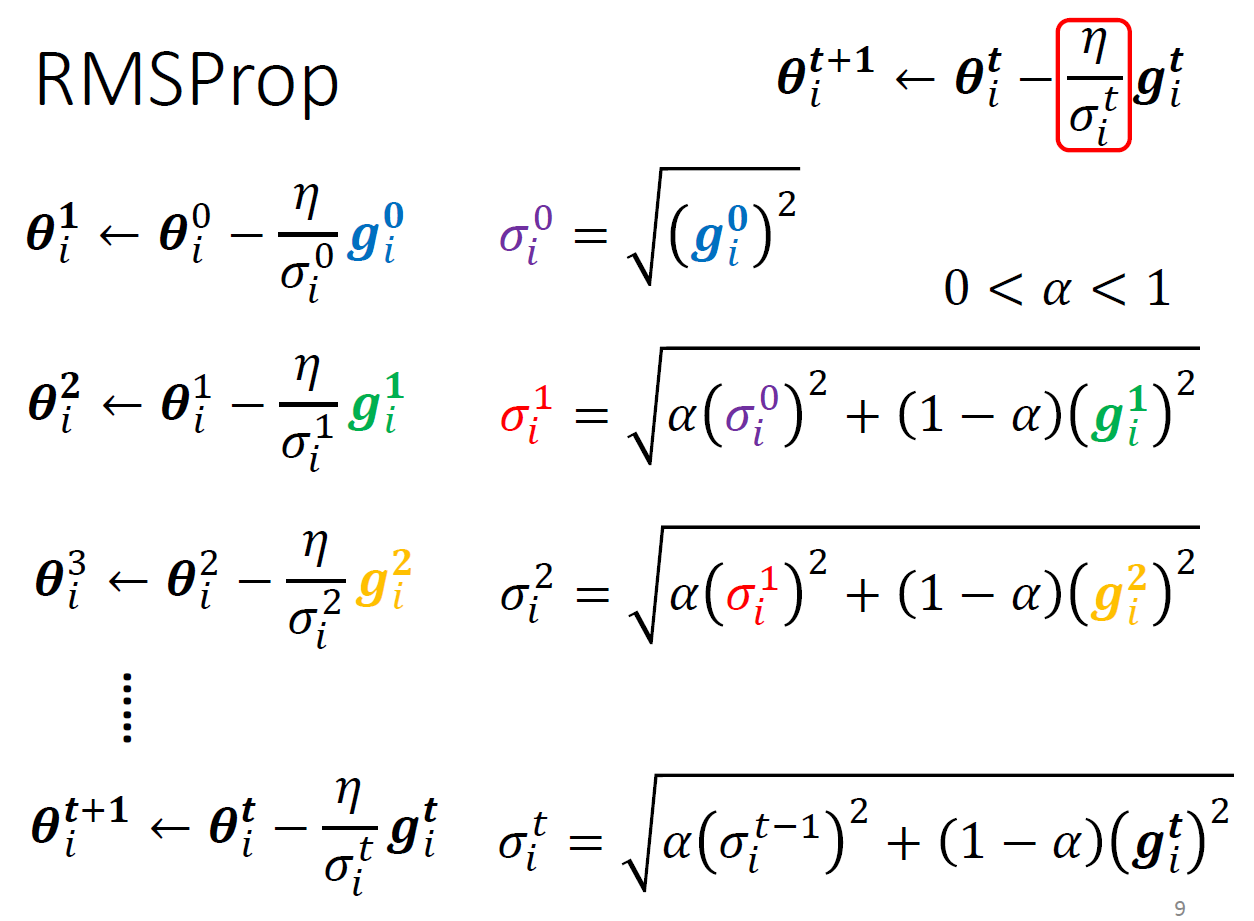
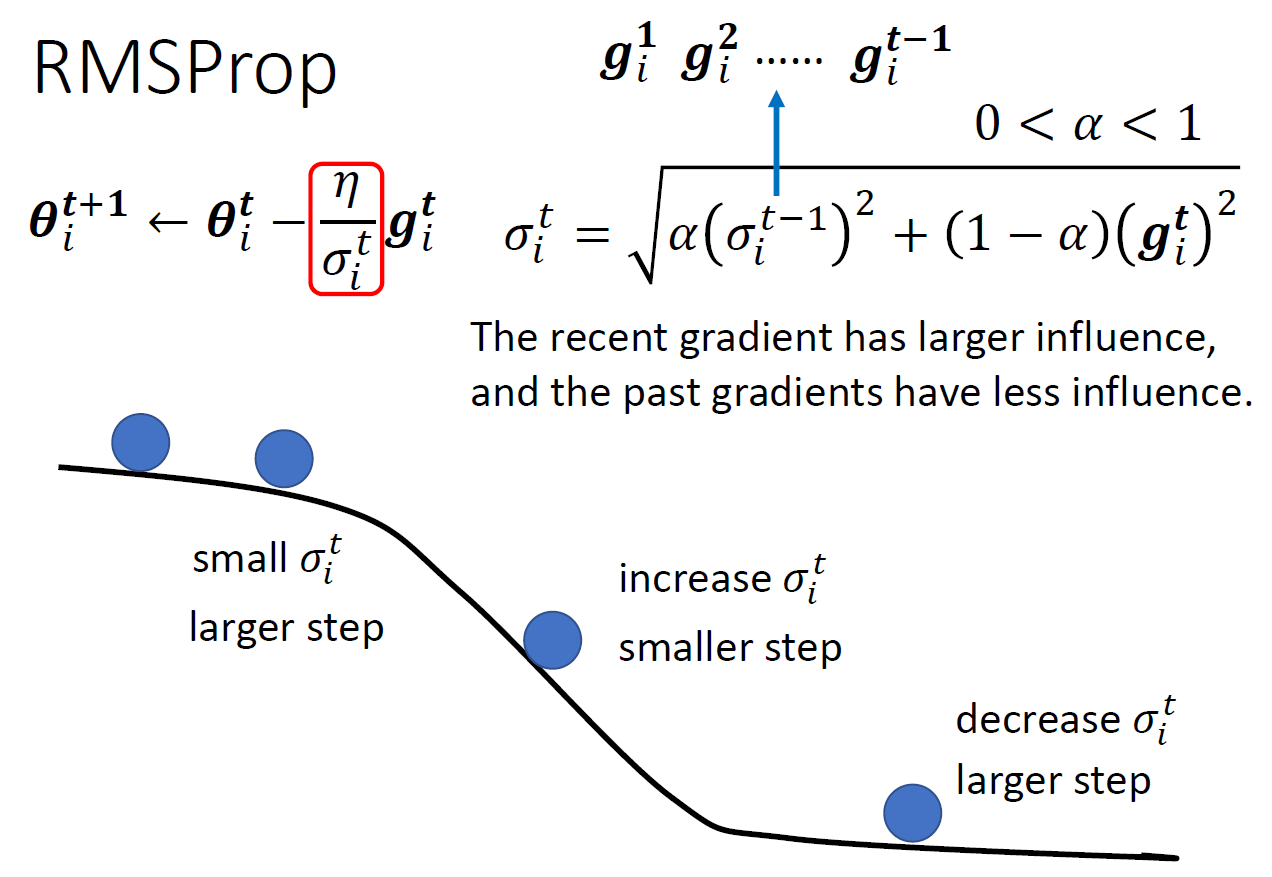
- using RMS
- Adagrad
- g small -> \(\sigma\) small -> learning rate big
- 把過去所有 gradient 拿來取 RMS
- calculation
- gradient 很小 -> \(\sigma\) 很小 -> 在平坦的地方爆出去
- to improve
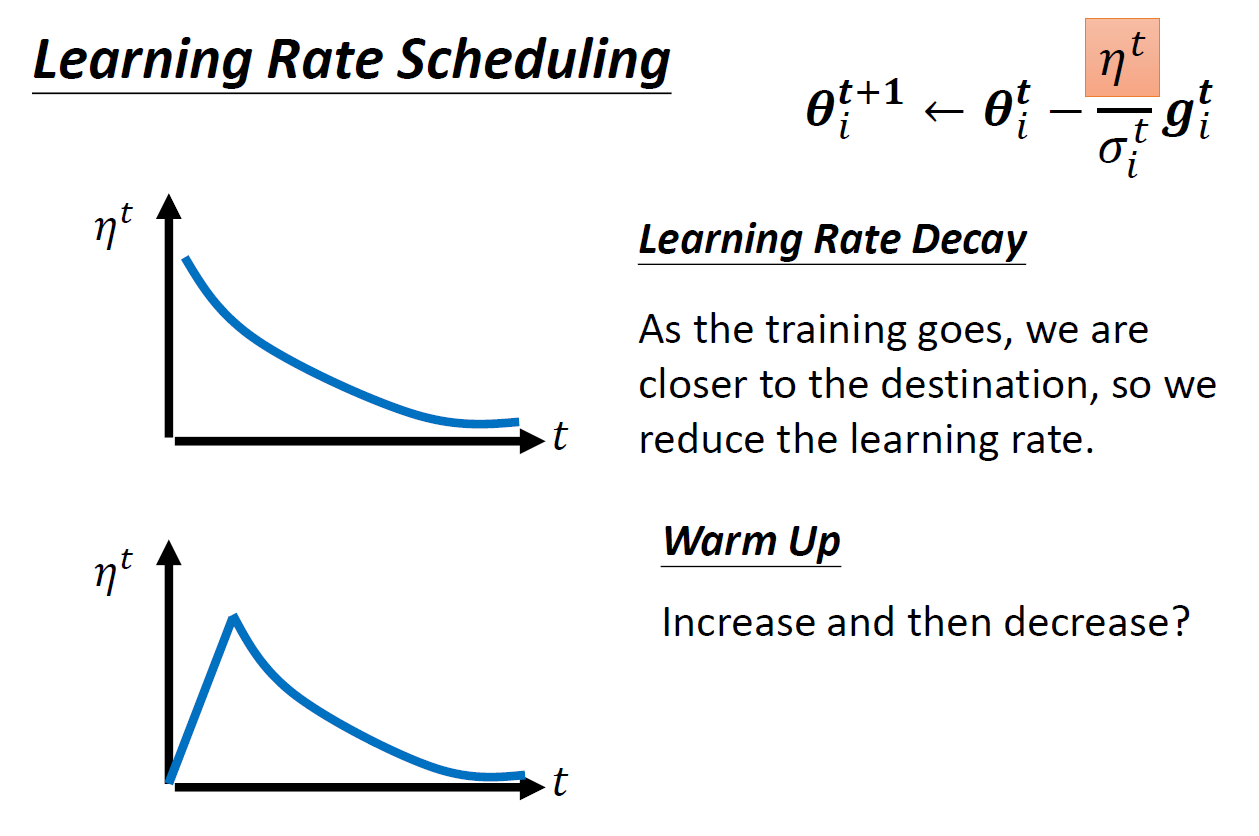
- warm up
- 先用小 learning rate 探索 error surface
- using RMSProp
- no original paper
- Adam: RMSProp + momemtum
- set, \(\alpha\), weight of current gradient, by yourself
- current gradient is more important (like EWMA)
- calculation
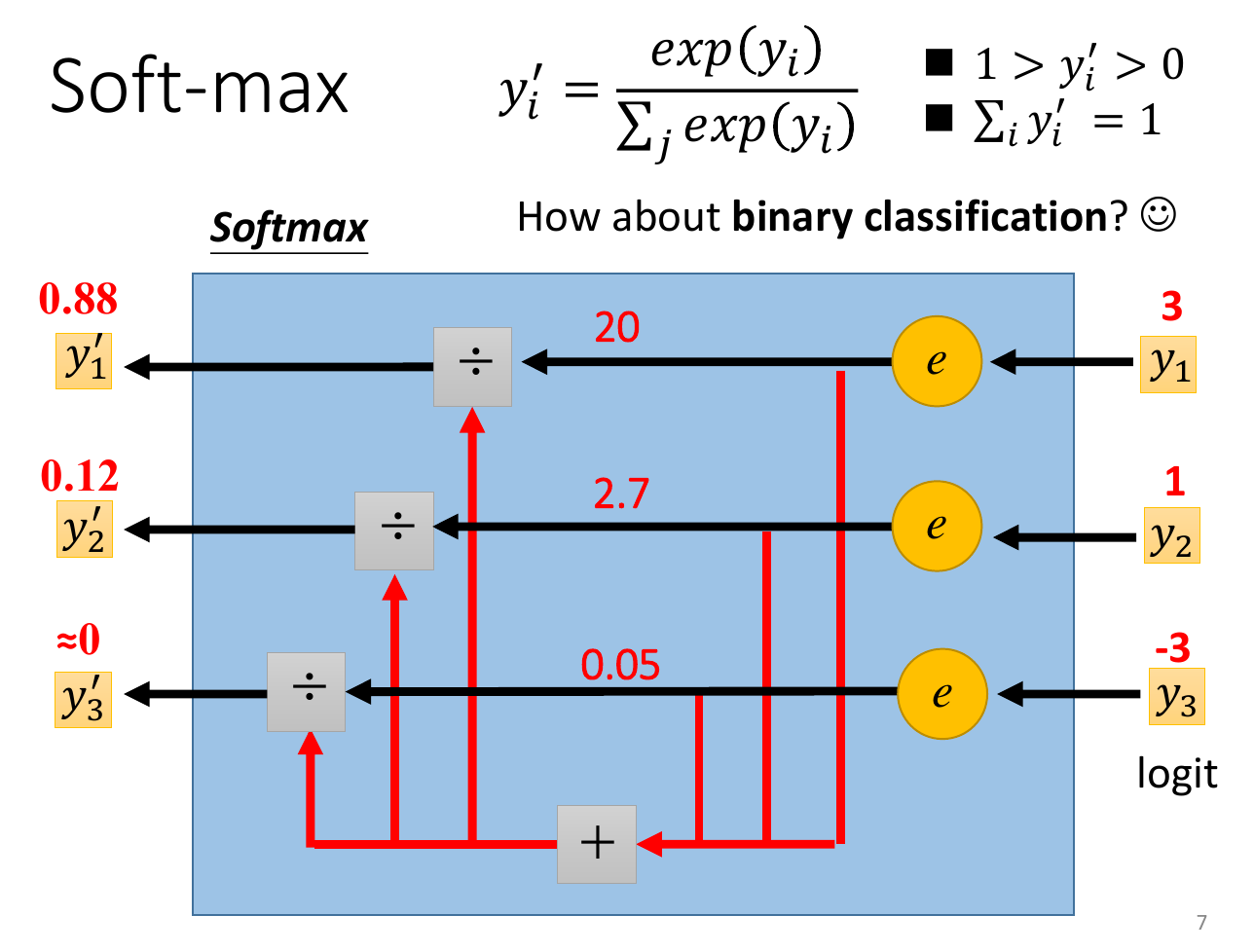
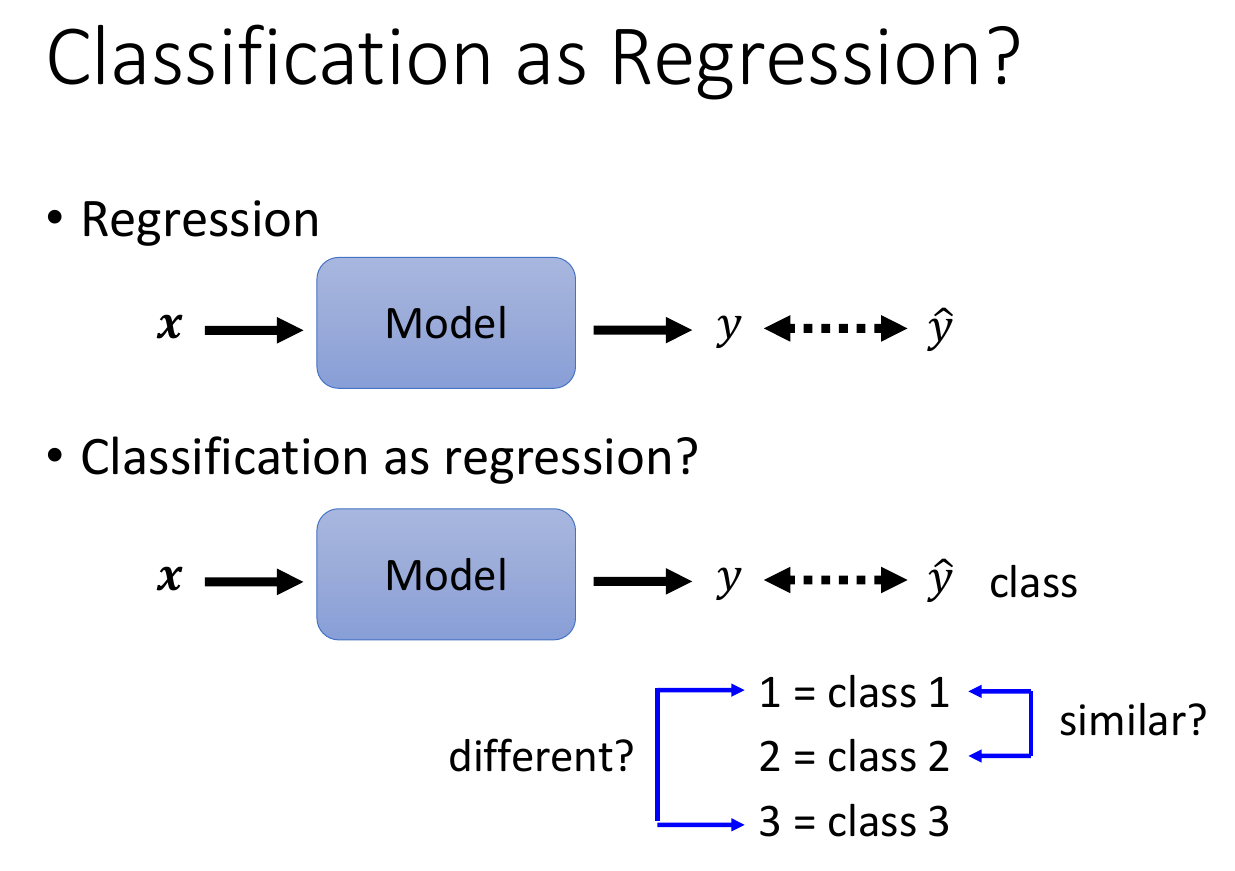
classification¶
- 希望 model output 接近 class 的值
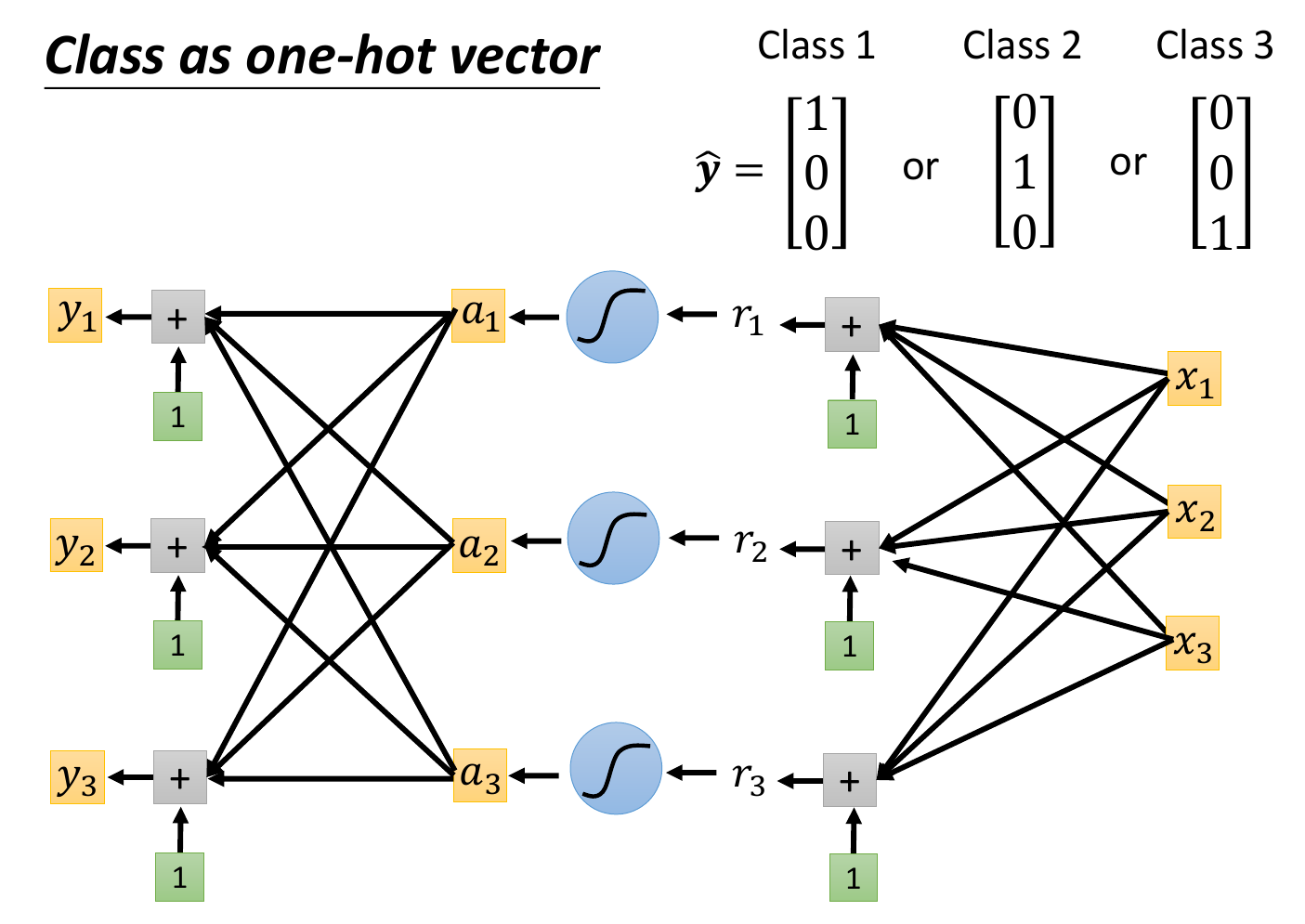
- represent class as one-hop vector (binary variable)
- softmax
- nomalize to 0-1
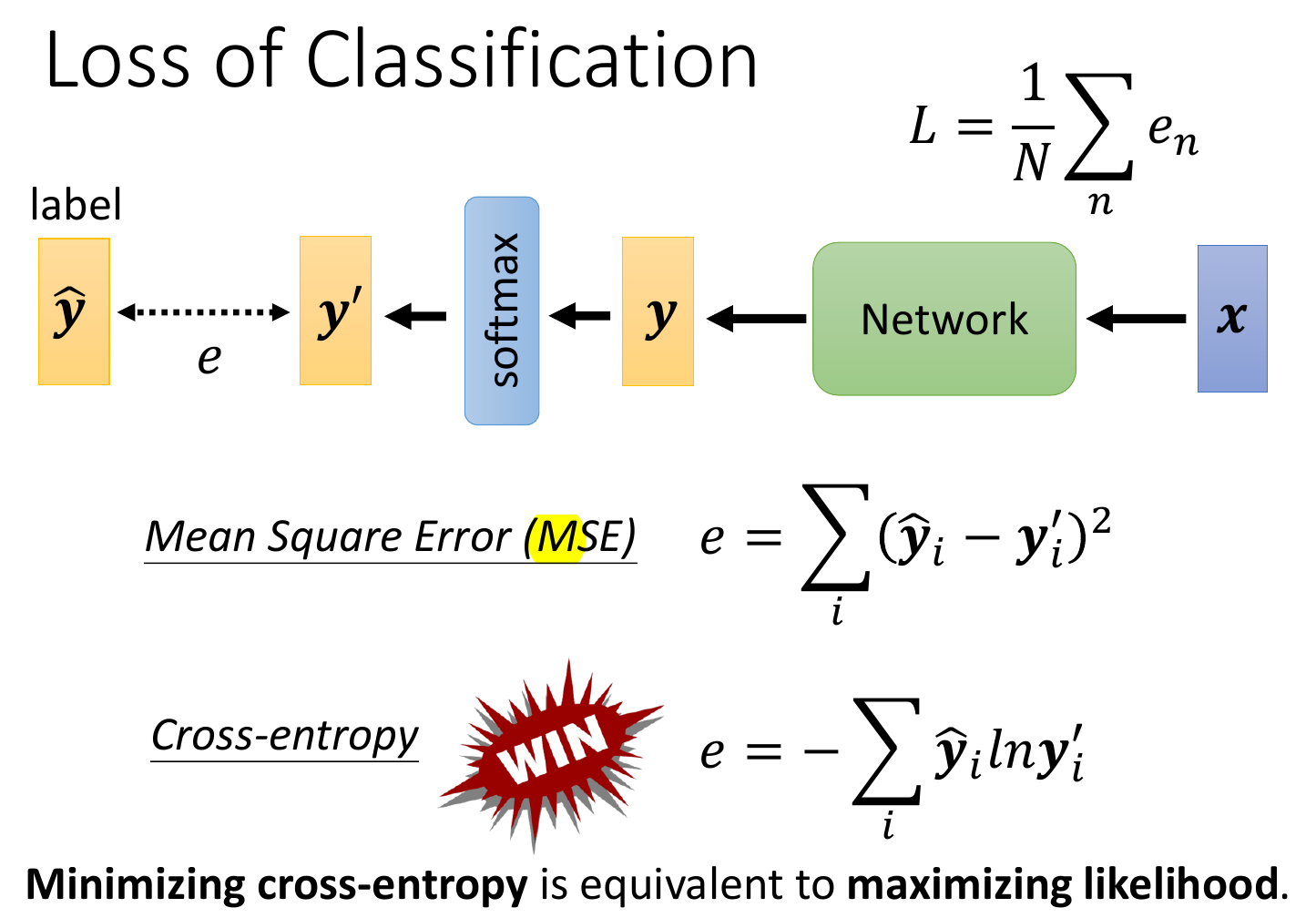
loss¶
- MSE
- cross entropy
- minimize cross entropy = maximize likelihood
- pytorch cross entropy includes softmax already
- better than MSE
- easier for optimization
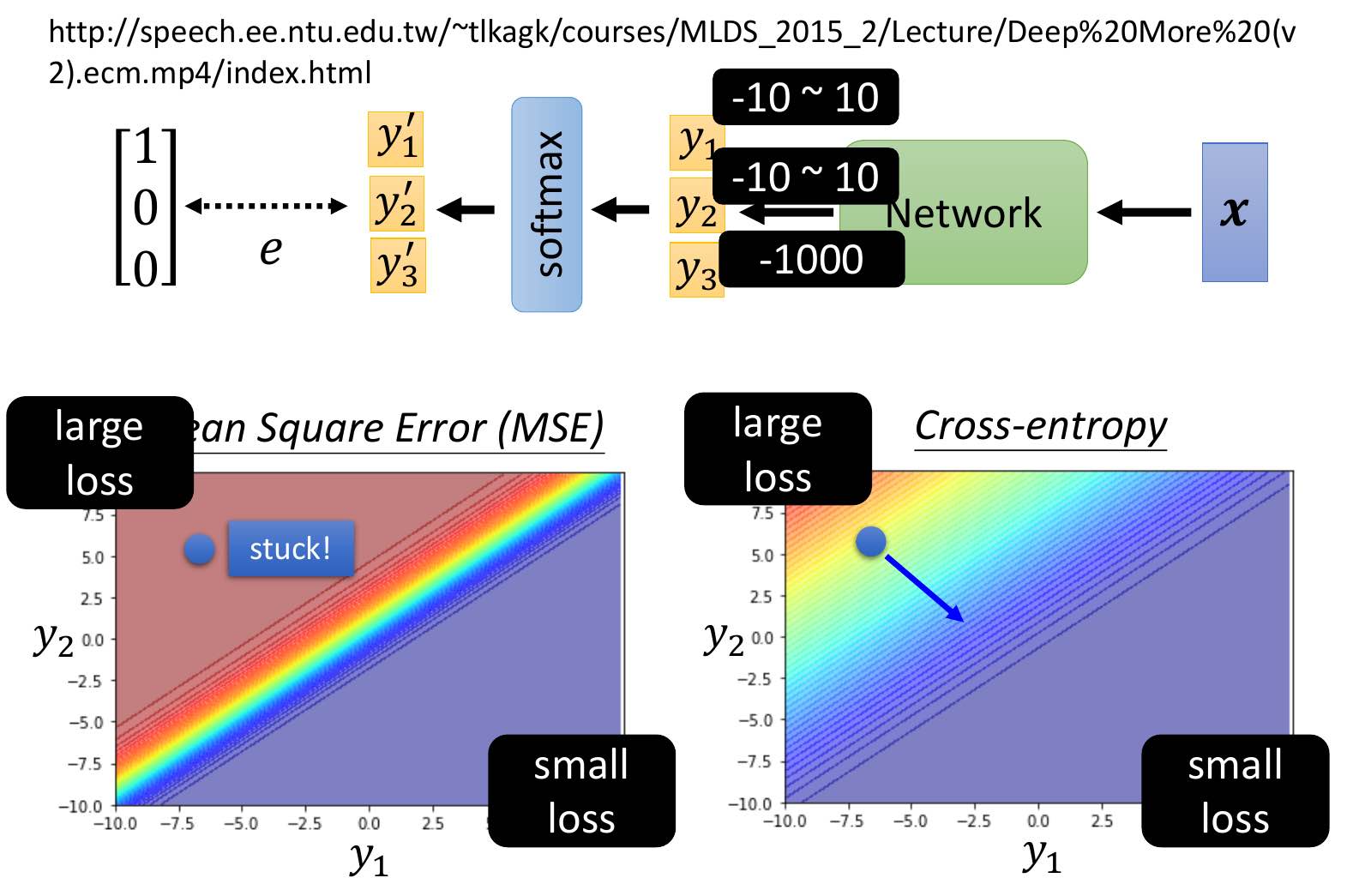 ]
]- with MSE, when start at left top (y1 small, y2 big, loss big), slope = 0 -> can't use gradient descent to reach right bottom (y1 big, y2 small, loss small)
- easier for optimization
BCEWithLogitsLosswithpos_weightfor imbalanced dataset
ROC & AUC Curve¶
- For balanced dataset
- ROC curve
- true positive rate vs. false positive rate under different threshold

- AUC Curve
- Area under ROC curve
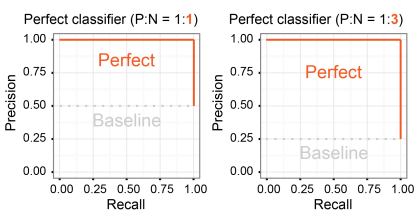
Precision Recall Rate¶
- For imbalanced dataset
- Precision vs. Recall Rate under different threshold
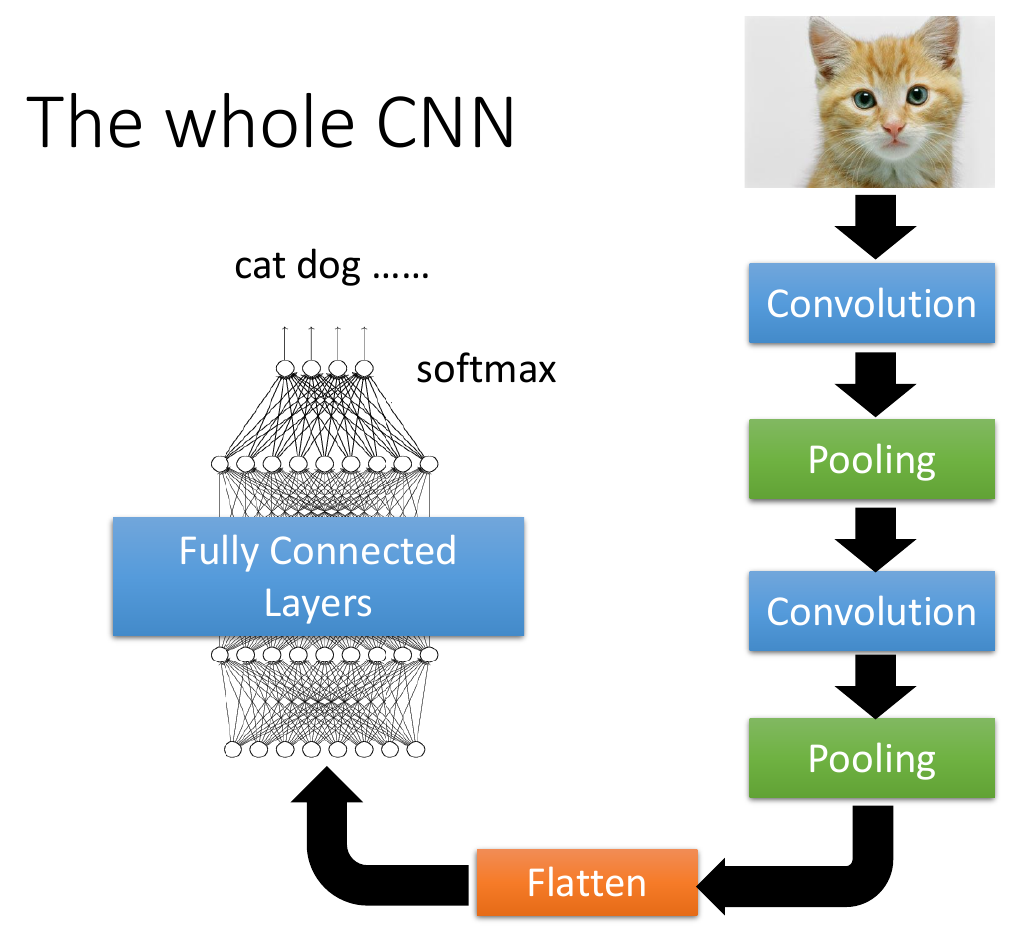
CNN¶
- image classification
- 3D tensor
- length
- width
- channels
- RGB
- convert 3D tensor to 1D vector as input
- 3D tensor
- alpha go
- 下圍棋: 19x19 (棋盤格子數) classification problem
- treat 棋盤 as an image and use CNN
- 格子 = pixel
- 49 channels in each pixel
- to store the status of the 格子
- 5x5 filter
- no pooling
- intolerant to scaling & rotation
- to solve
- data augmentation
- rotate and scale first to let CNN know
- spatial transformer layer
- data augmentation
- to solve
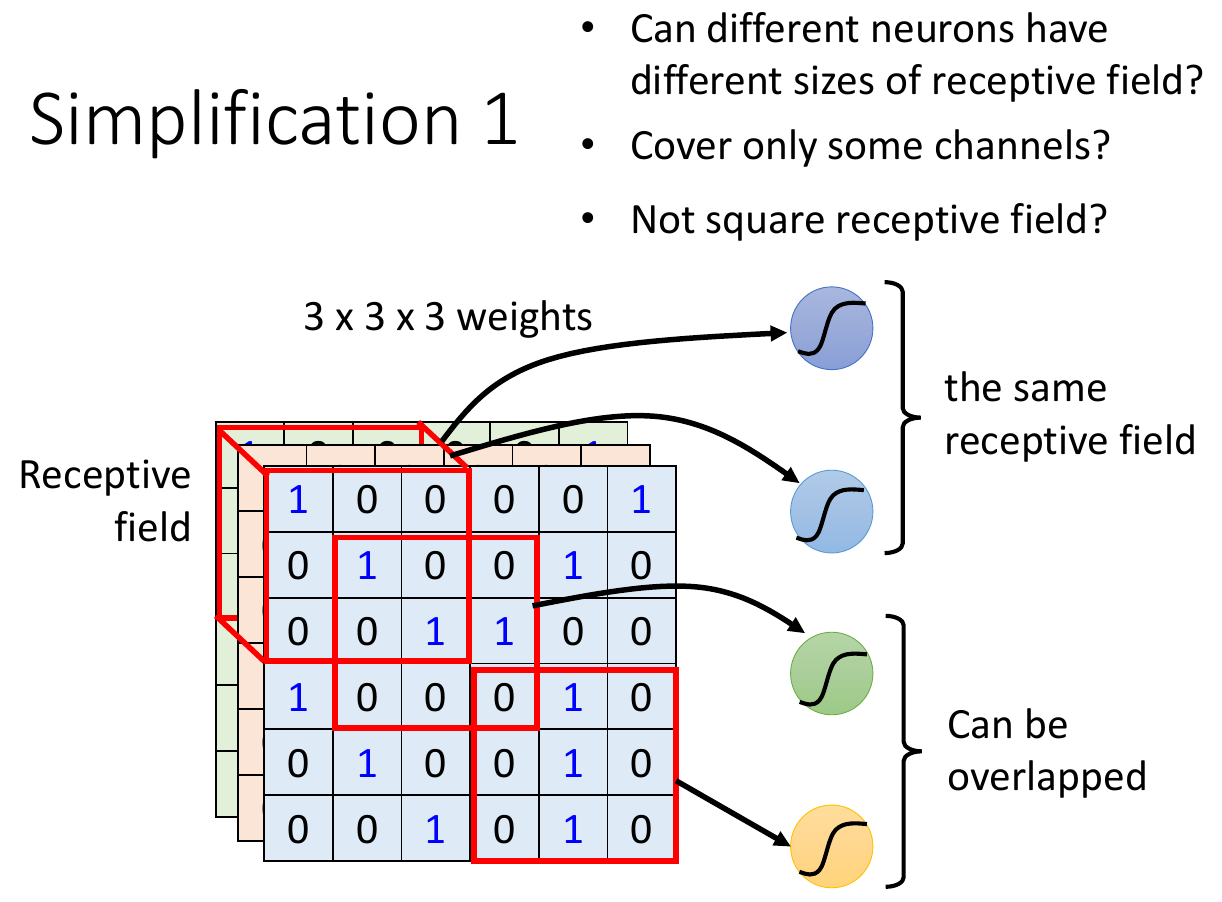
receptive field¶
- each neuron has a part as input, instead of giving in the whole image
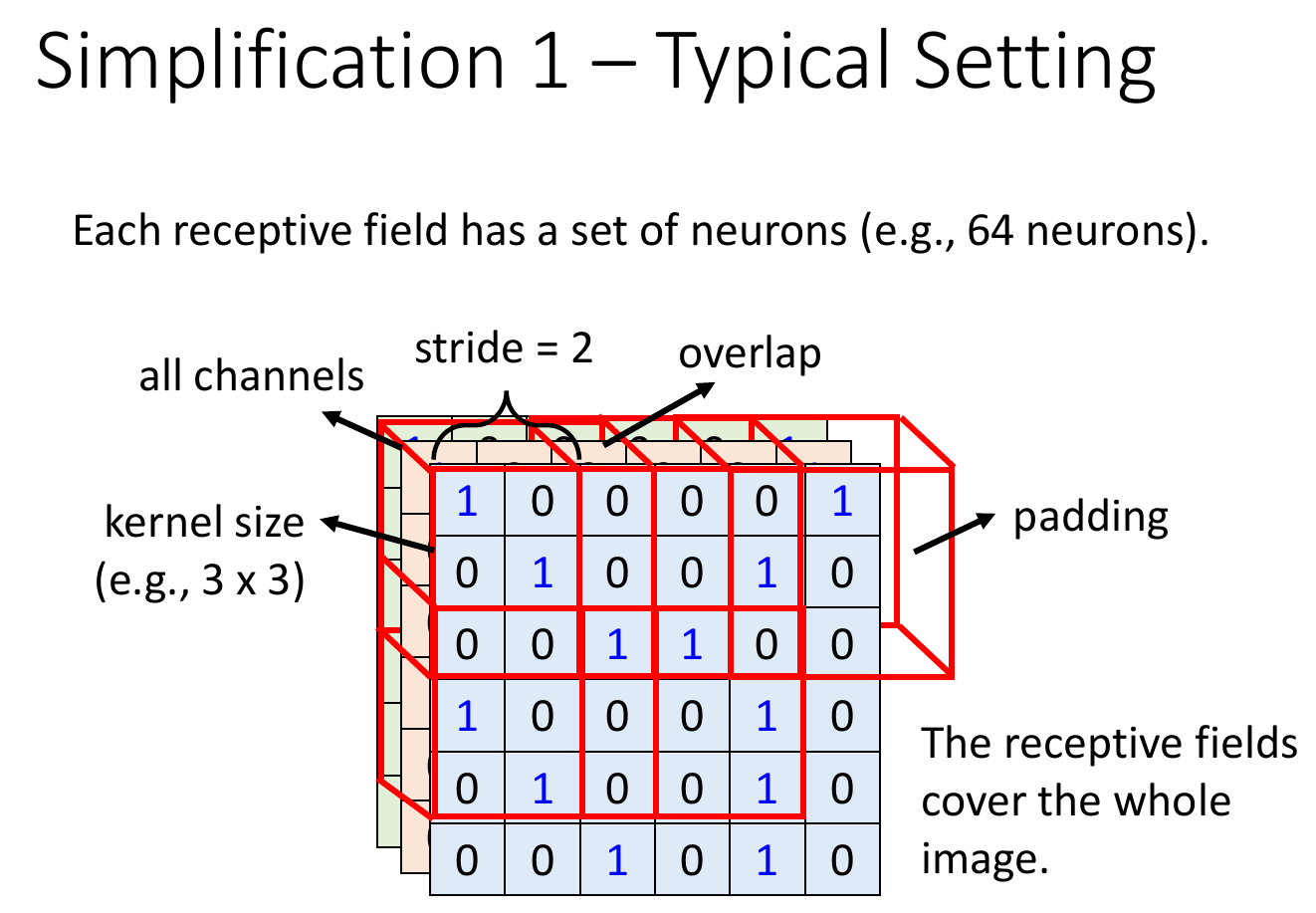
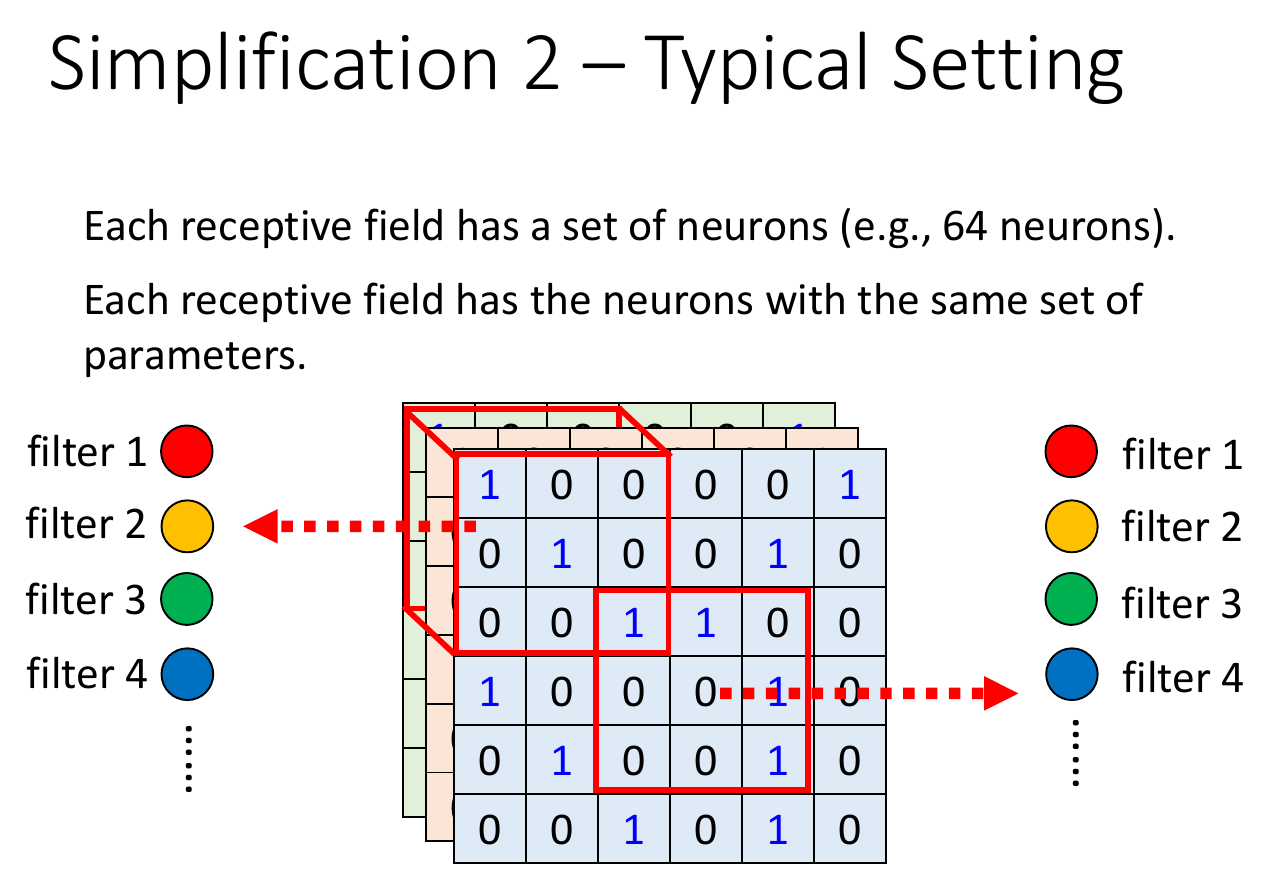
- typical settings
- kernel size = 3x3 (length x width)
- each receptive field has a set of neurons
- each receptive field overlaps
- s.t. otherwise things at the border can't be detected
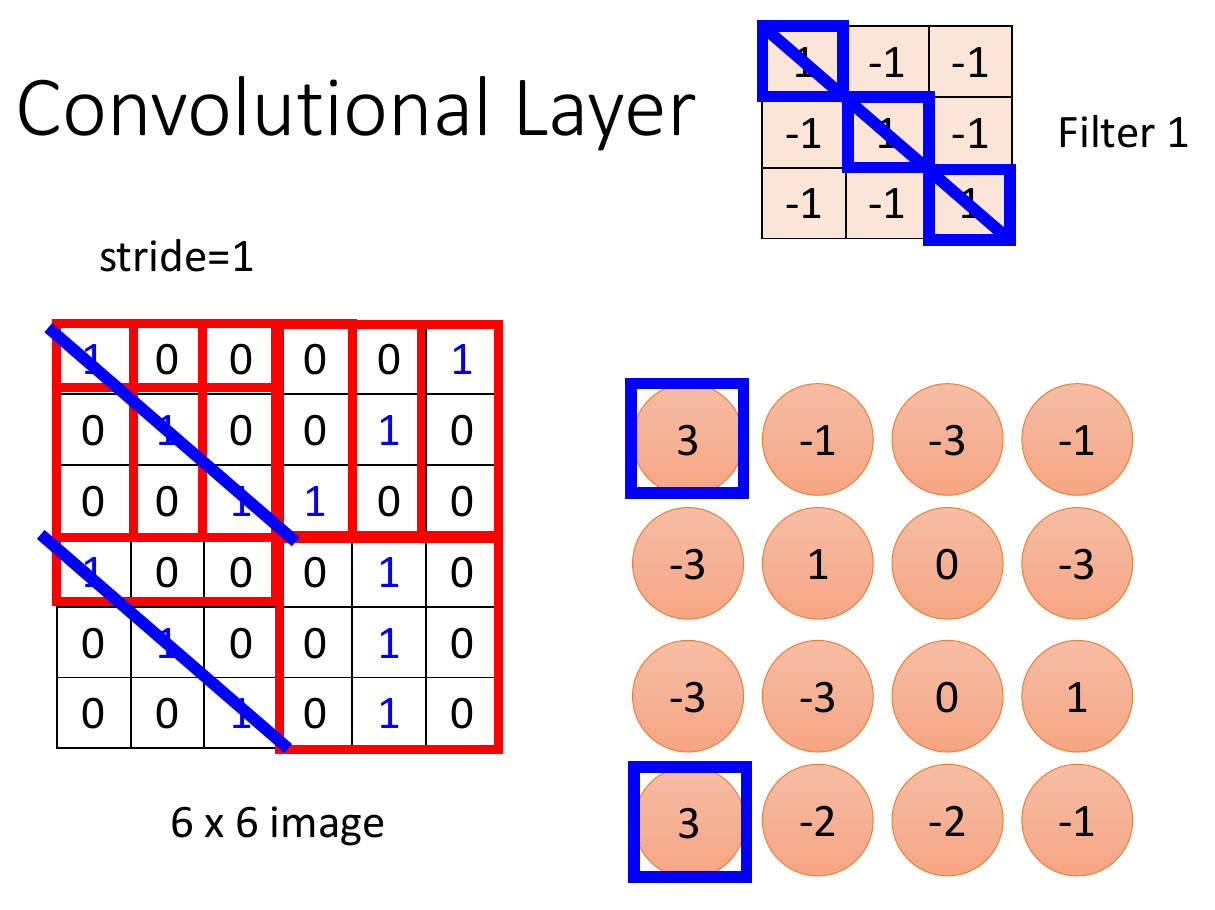
- stride = the step, the distance between 2 receptive field
- when receptive field is over the image border, do padding i.e. filling values e.g. 0s -> zero padding
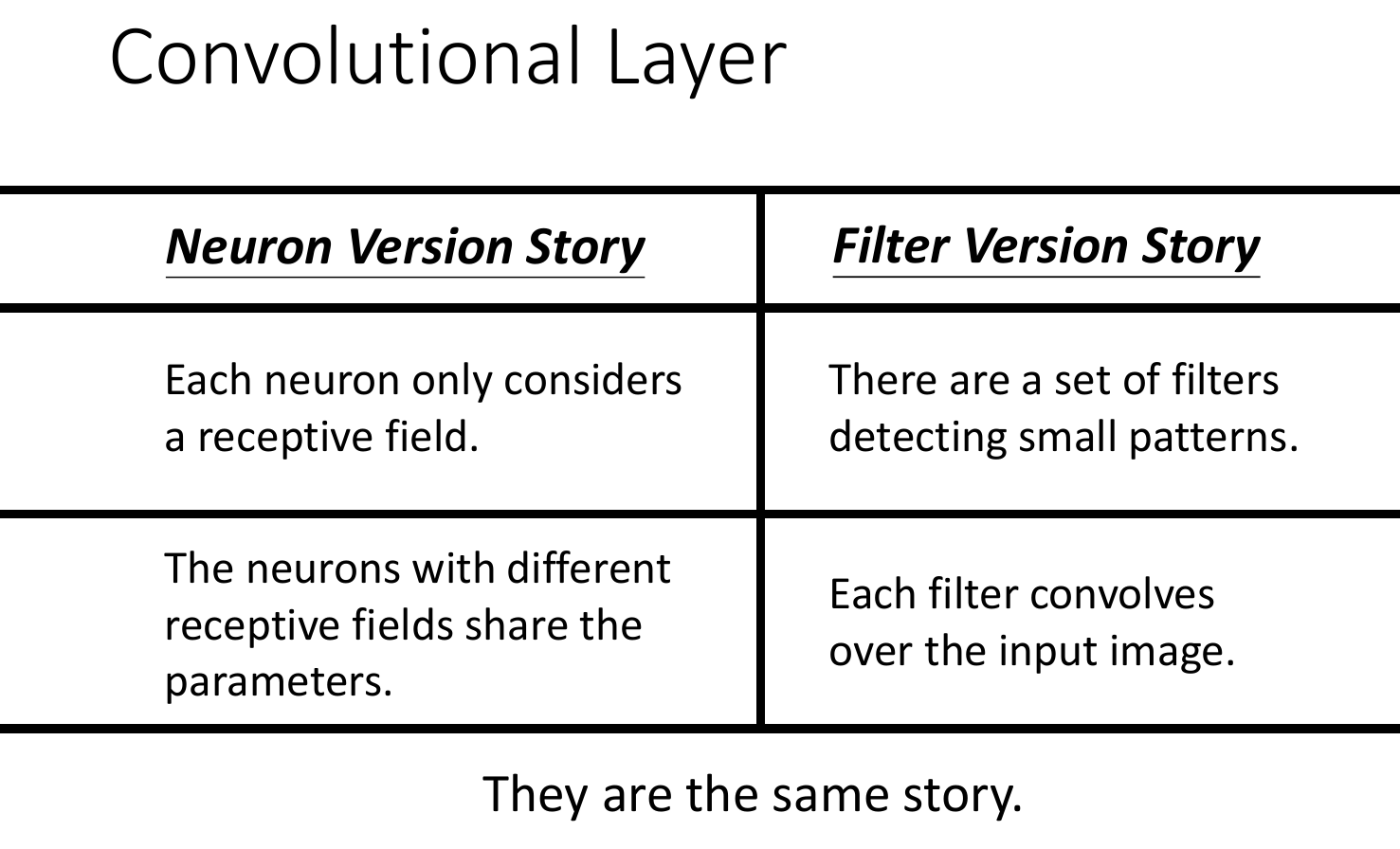
filter¶
- parameter sharing
- having dedicated neuron (e.g. identifying bird beak) at each receptive field is kind of a waste -> parameter sharing
- same weight
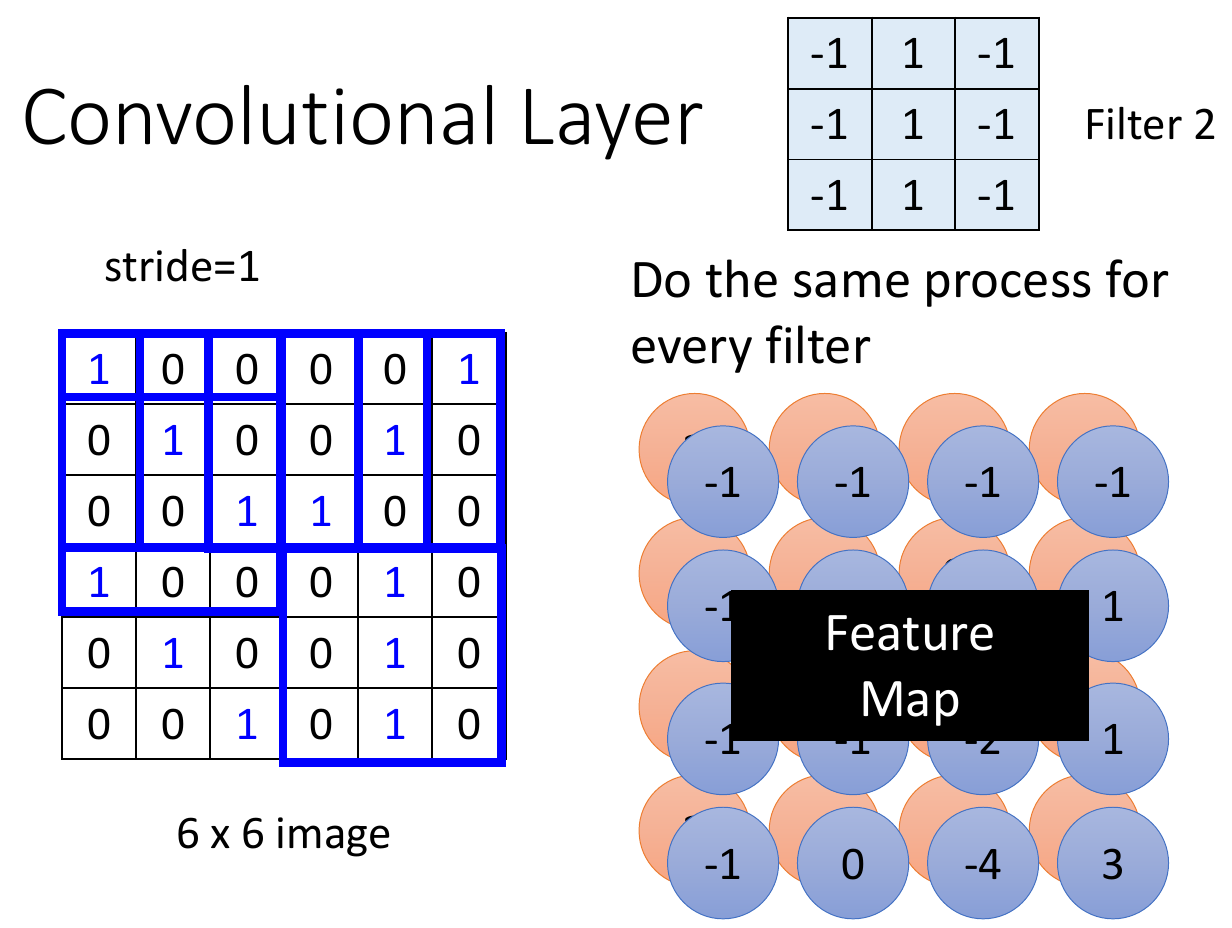
- filter
- a set of weight
- used to identify certain patterns
- do inner product with receptive field -> feature map, then find fields giving big numbers
- typical settings
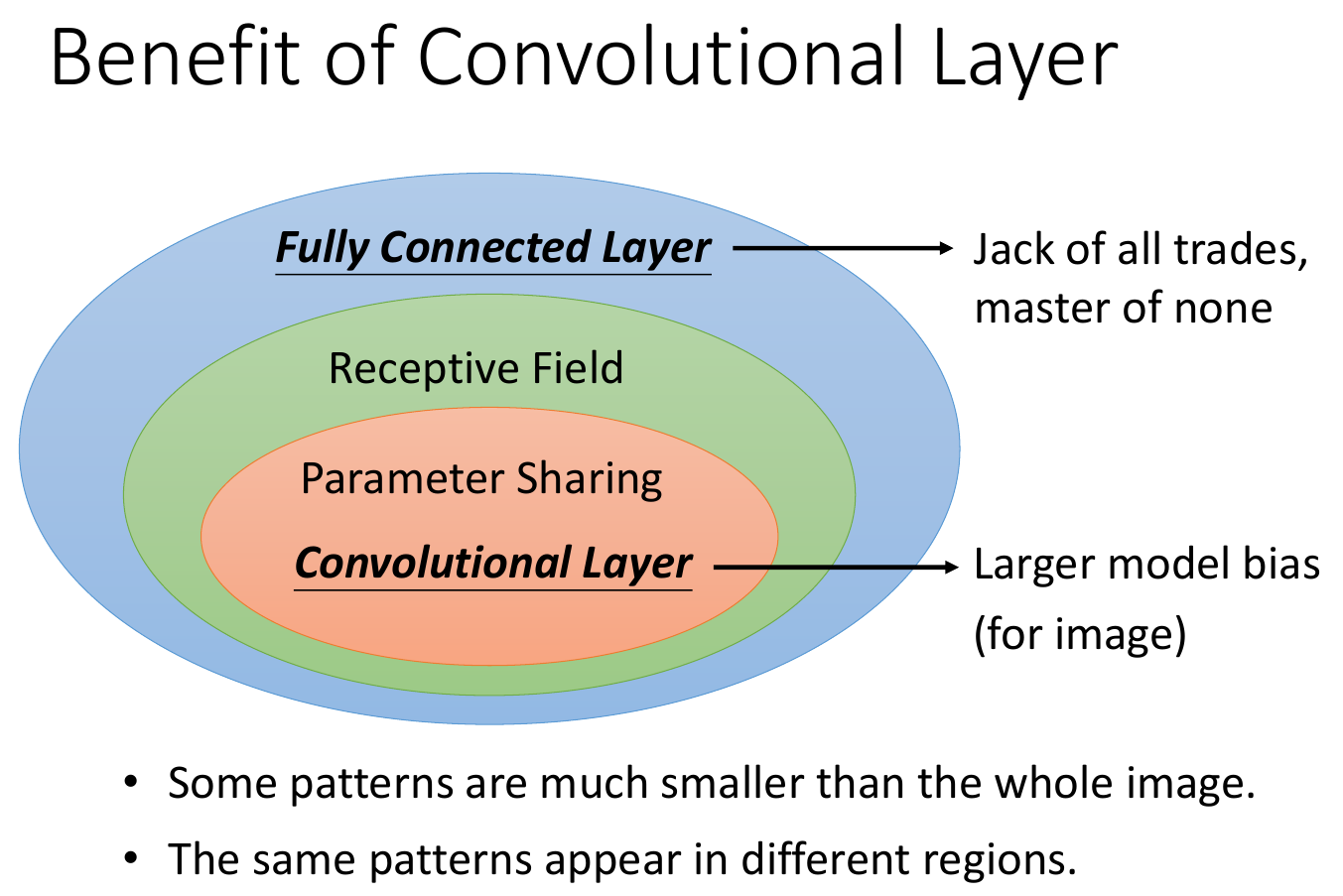
convolution layer¶
- fully connected
- complete flexibility
- can look at whole or only a small part
- receptive field
- lower flexibility
- limited to only look at a small part
- parameter sharing
- lowest flexibility
- forced to use shared parameters
- convolution layer
- bigger bias
- good for specific tasks e.g. image classification
- neural network using convolutional layer -> CNN
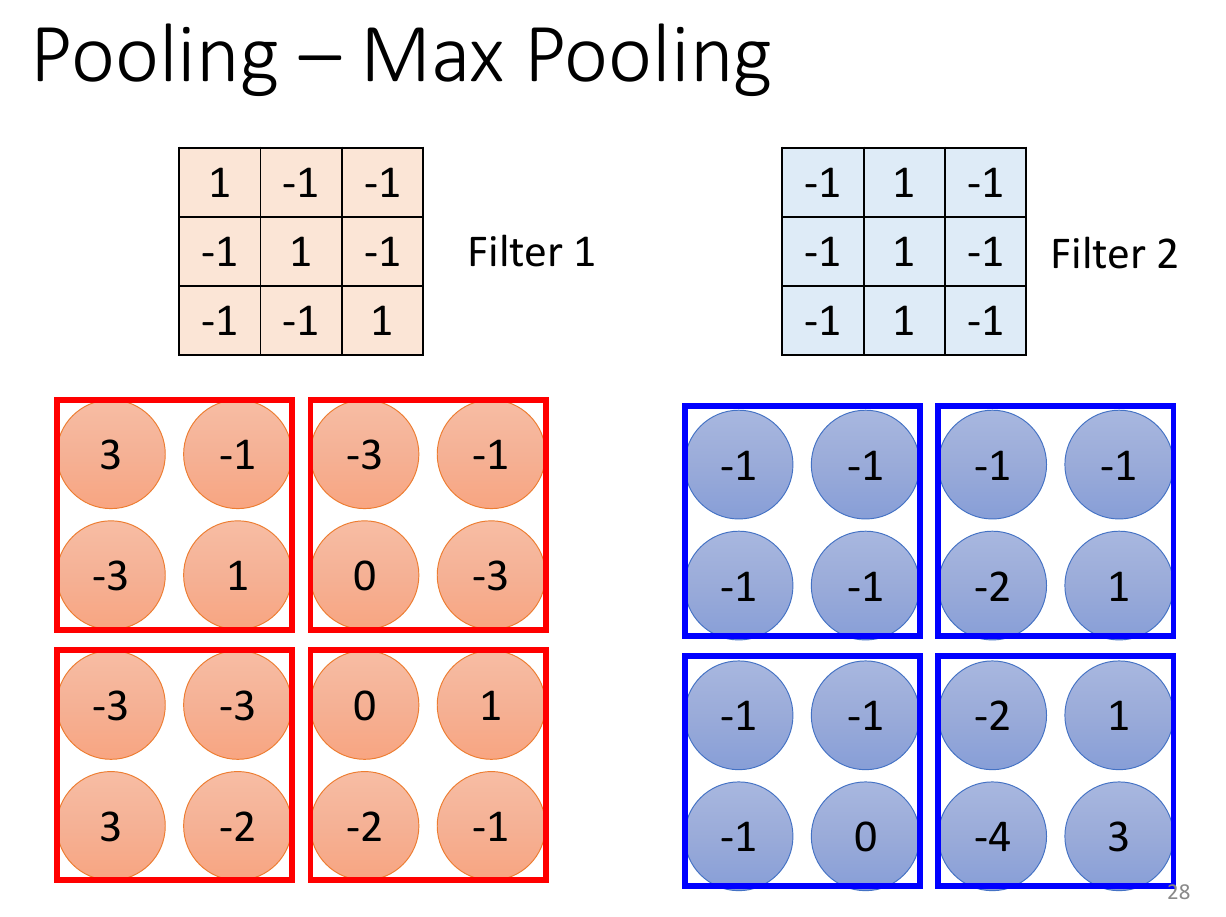
pooling¶
- subsampling, make image smaller
- to reduce computation
- have enought compulation resource -> can omit pooling
- max-pooling
- only select the larger number after applying filter
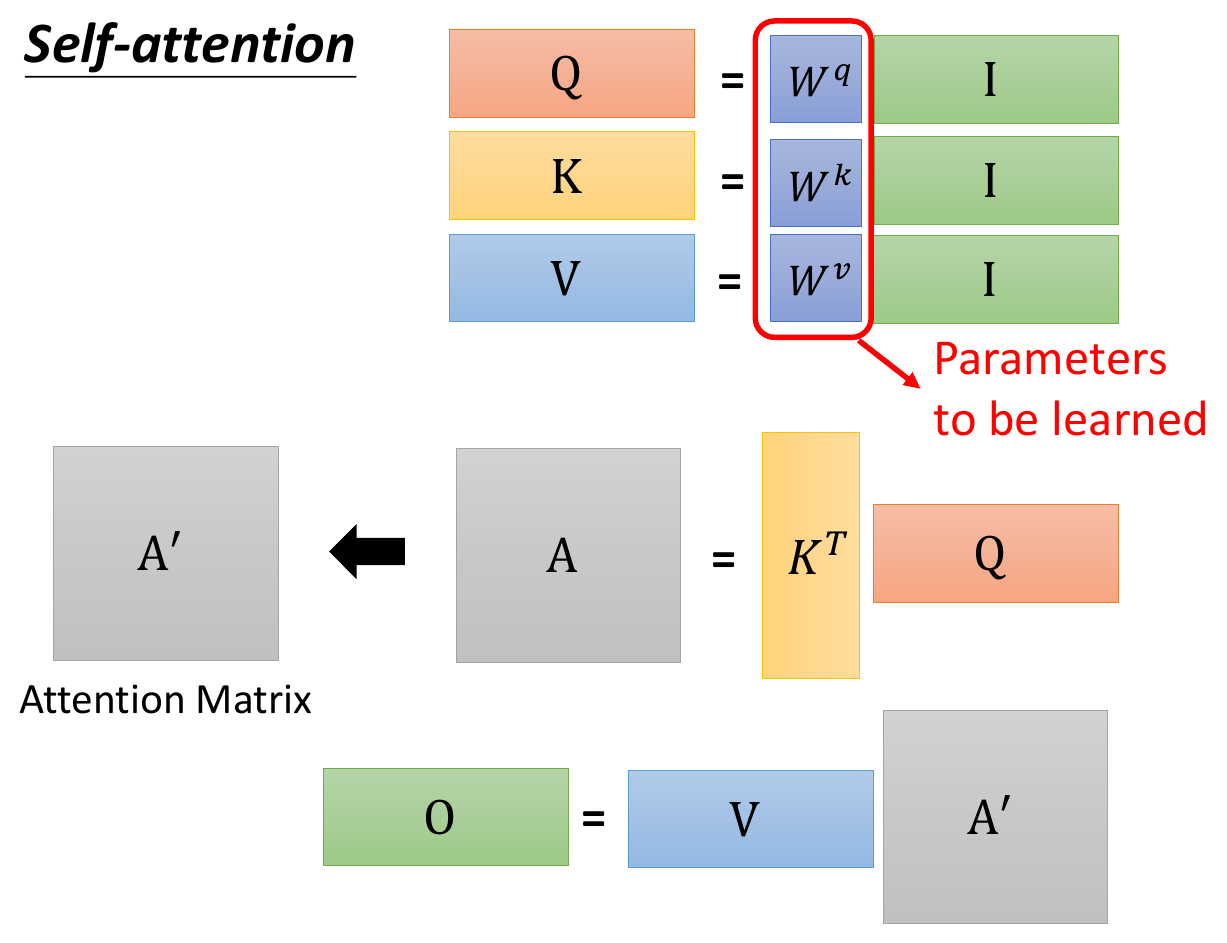
self attention¶
- input a (set of) vector(s)
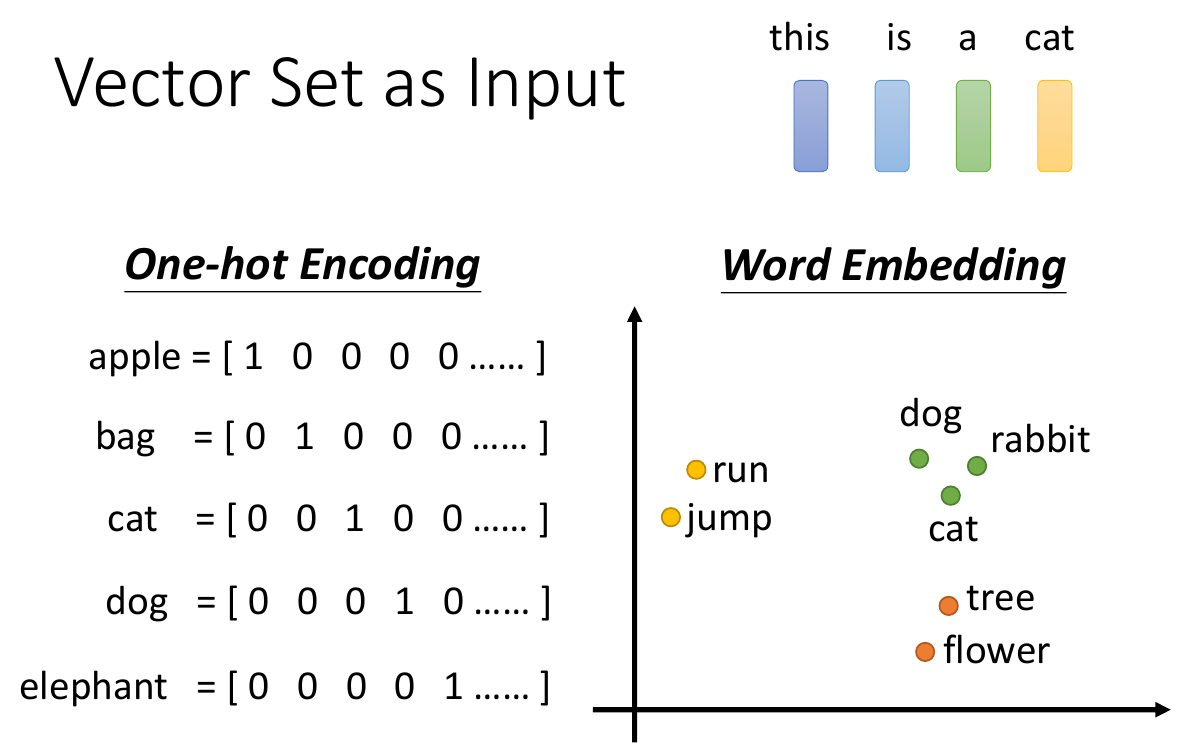
- one-hot vector cons
- treat each as independent, but there may be some correlations for some
- graph -> a set of vectors
- output label(s)
- sequence labeling
- input.length = output.length
- give each a label
- can consider neighbor wil fully-connected network
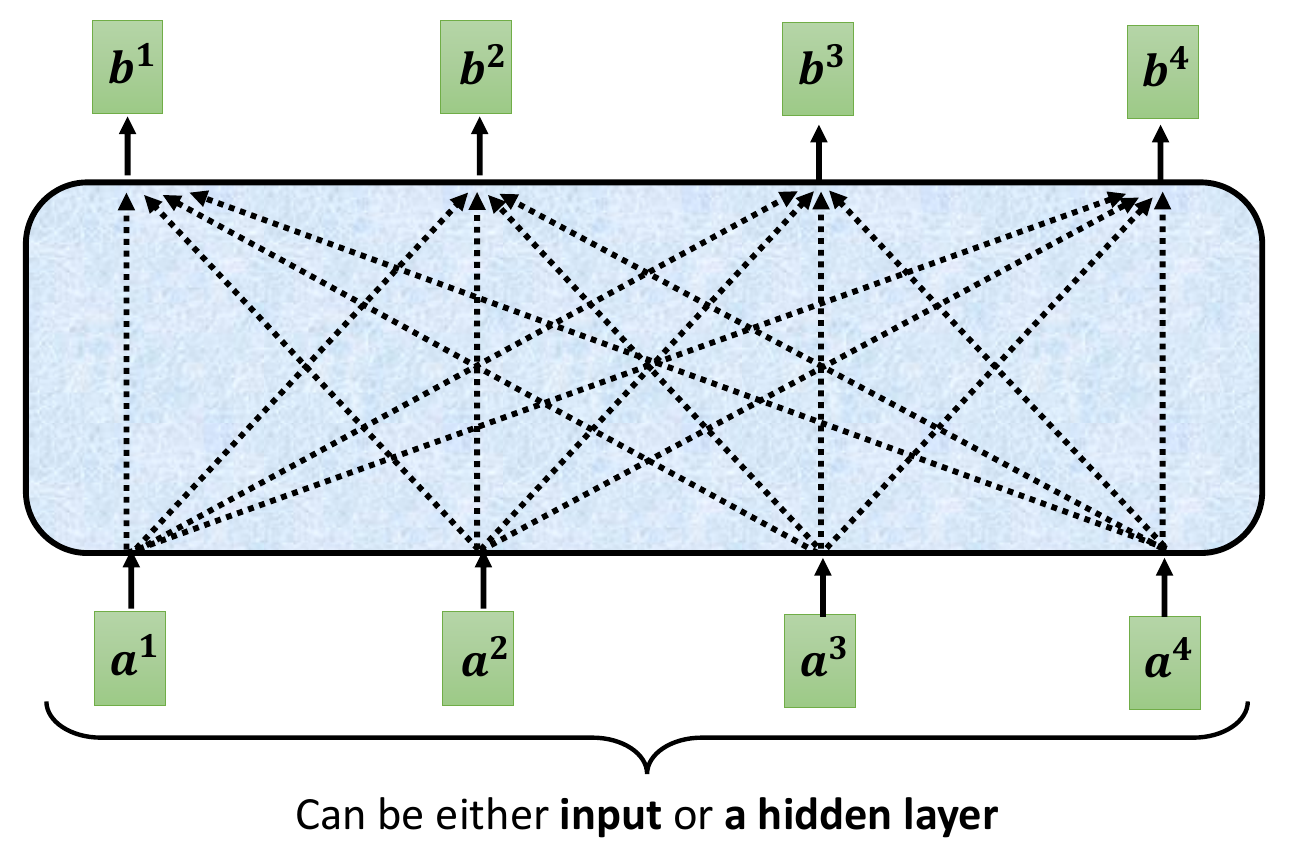
- to consider the whole input sequence -> self-attention
- input.length = output.length
- can use self-attention multiple times
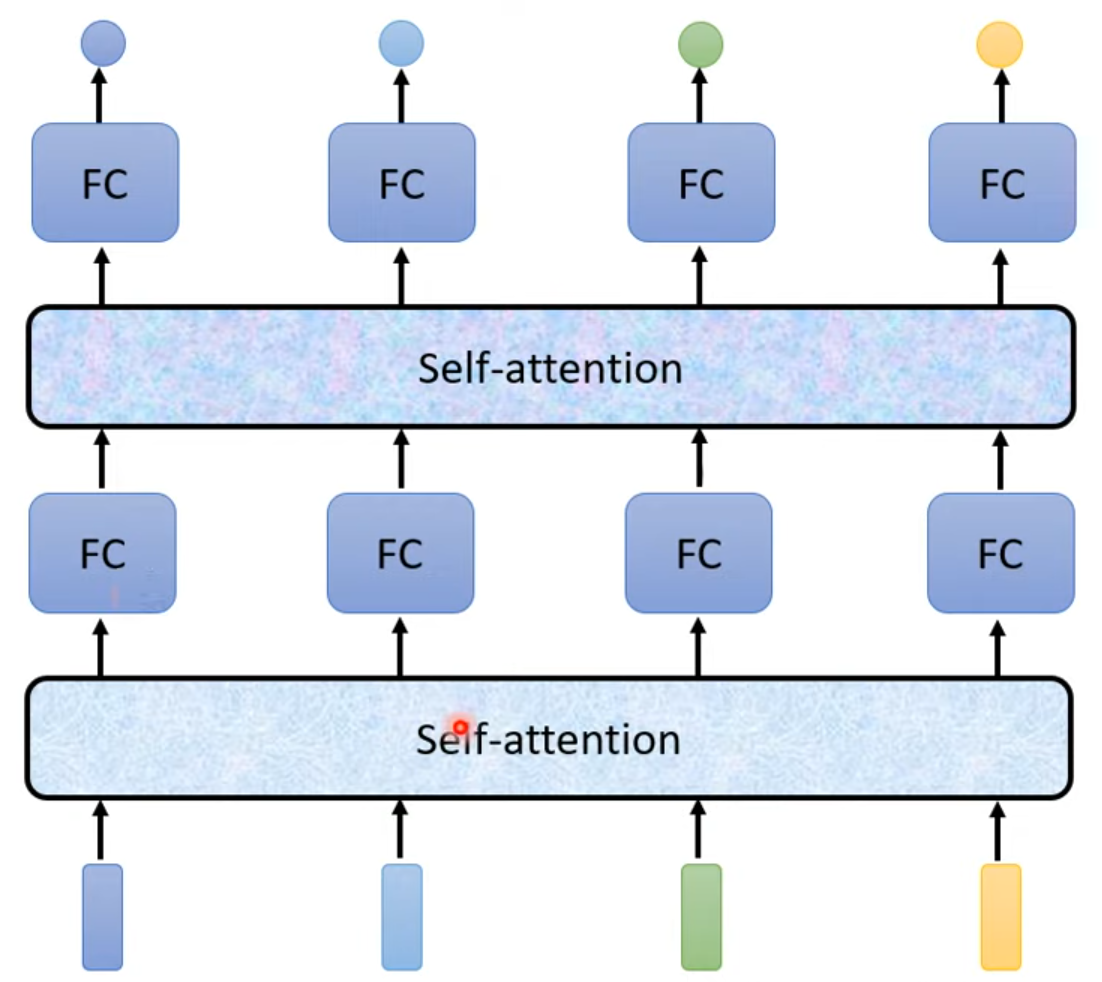
- FC = fully-connected
- use fully-connected to focus, use self-attention to consider the whole
- computation
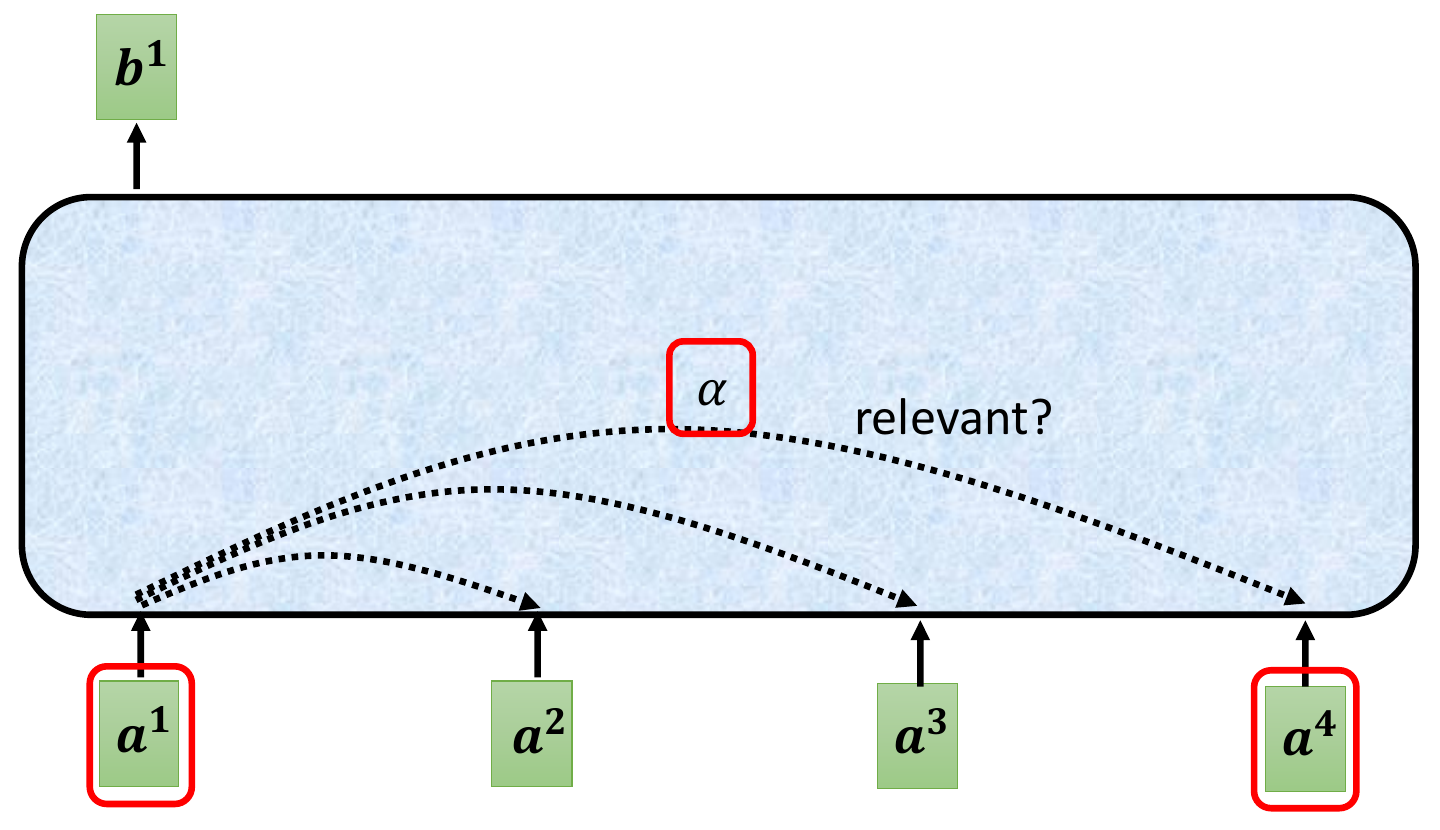
- \(\alpha\) = attention score
- the correlation between 2 vectors
- 2 methods to compute
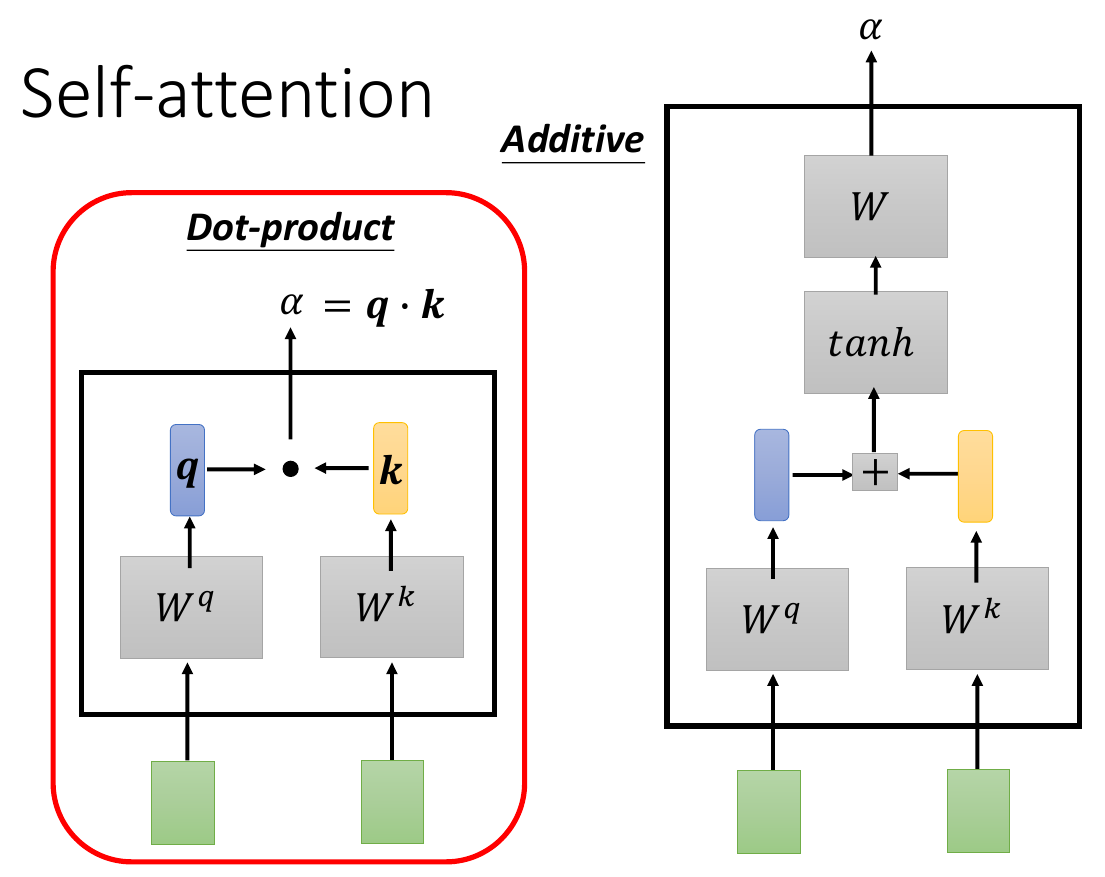
- left is more common
- the correlation between 2 vectors
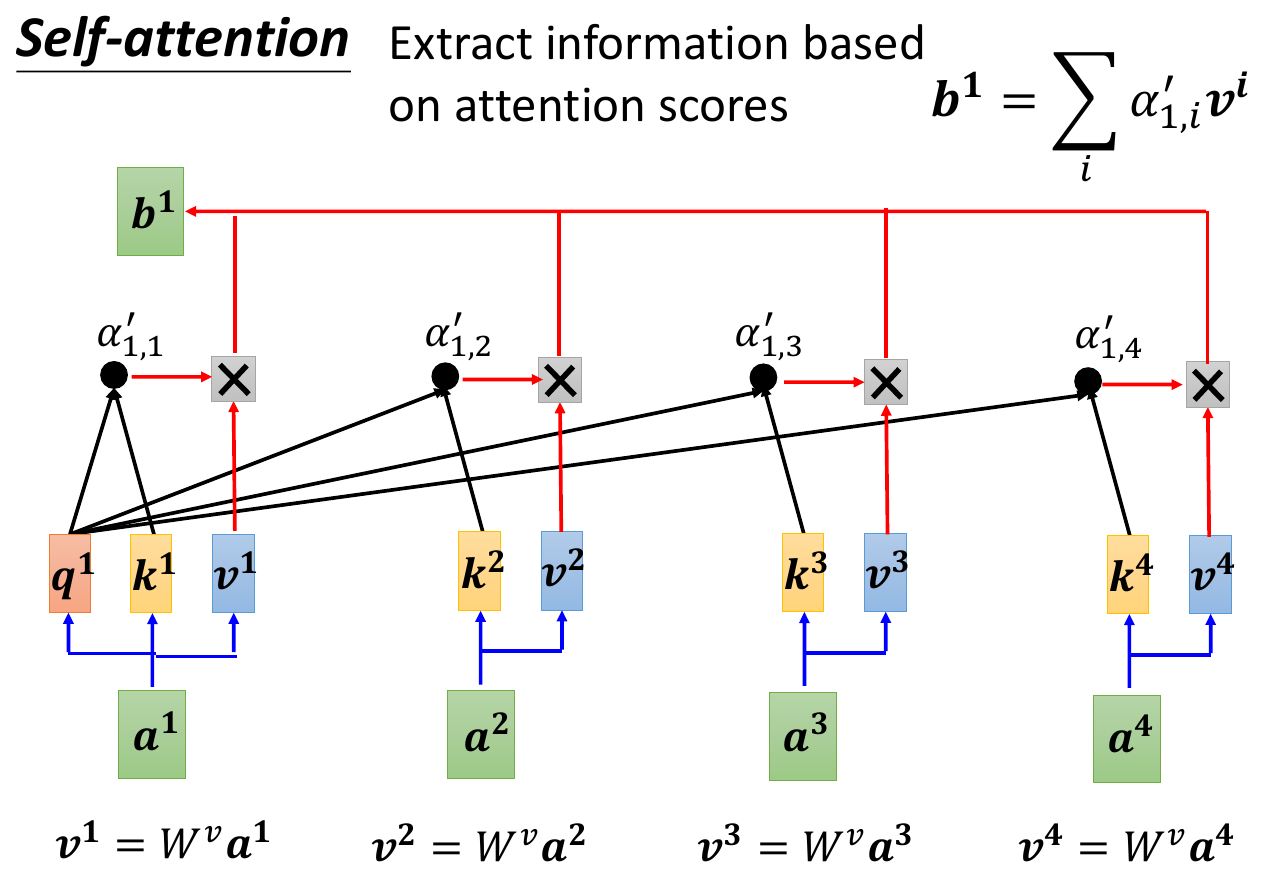
- get all \(\alpha\) and calculated weighted sum -> b1
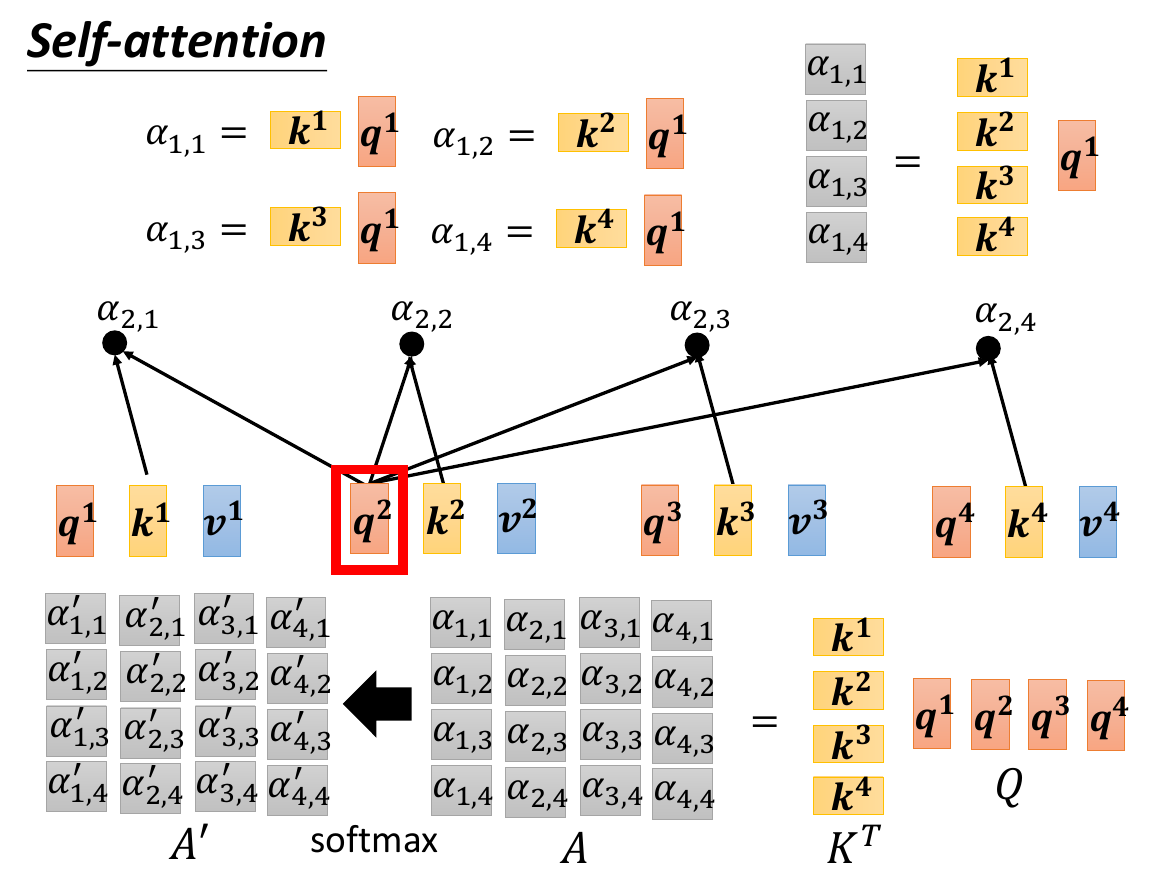
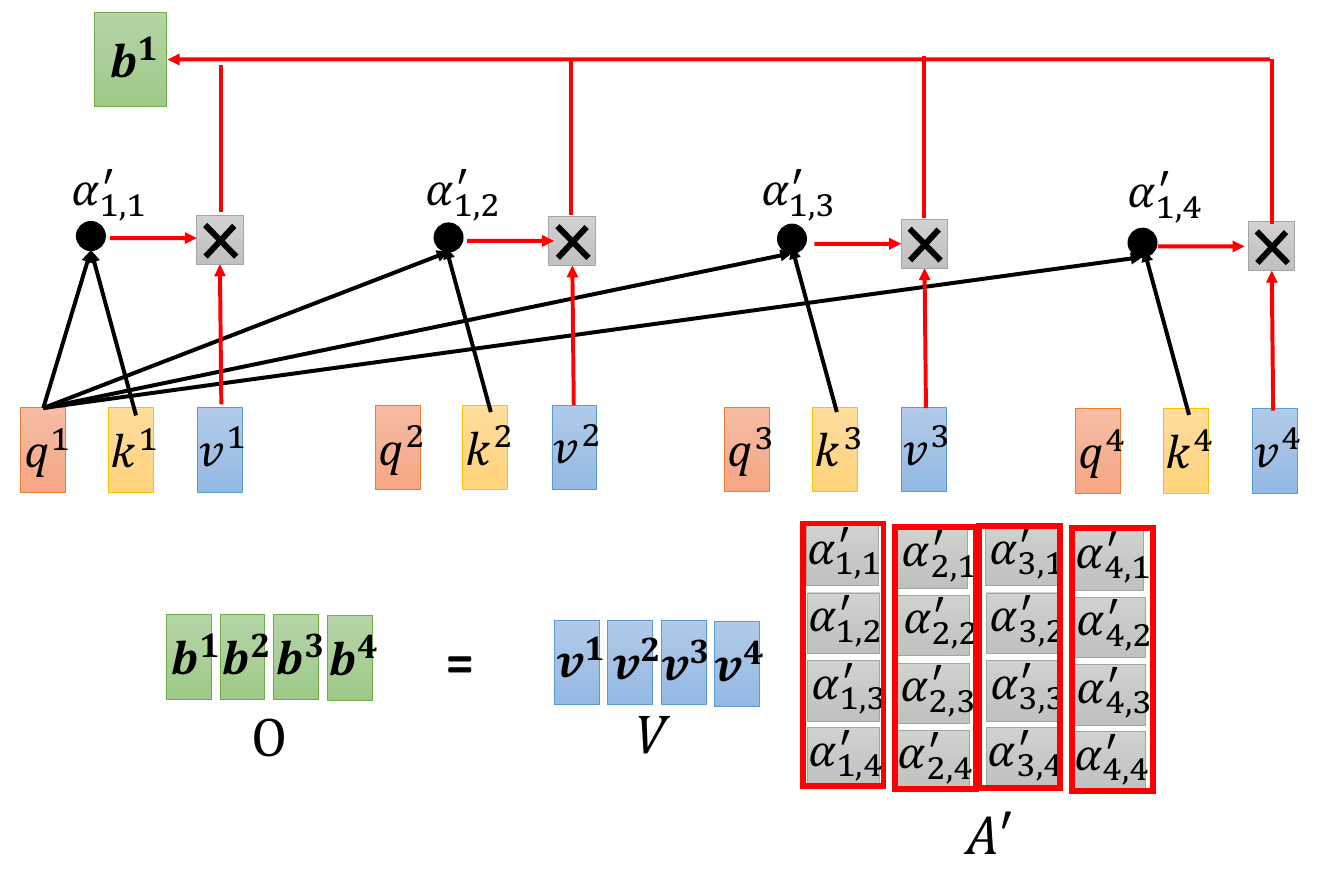
- full calculation
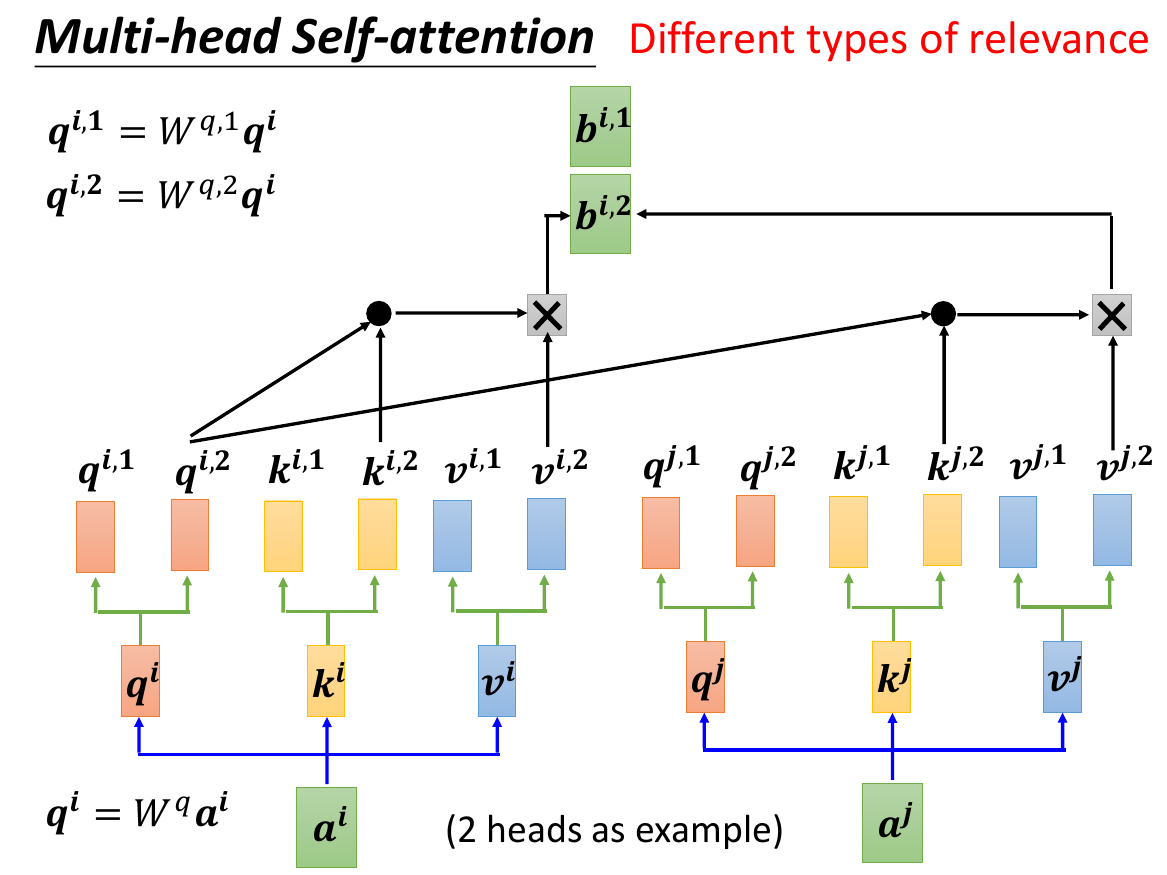
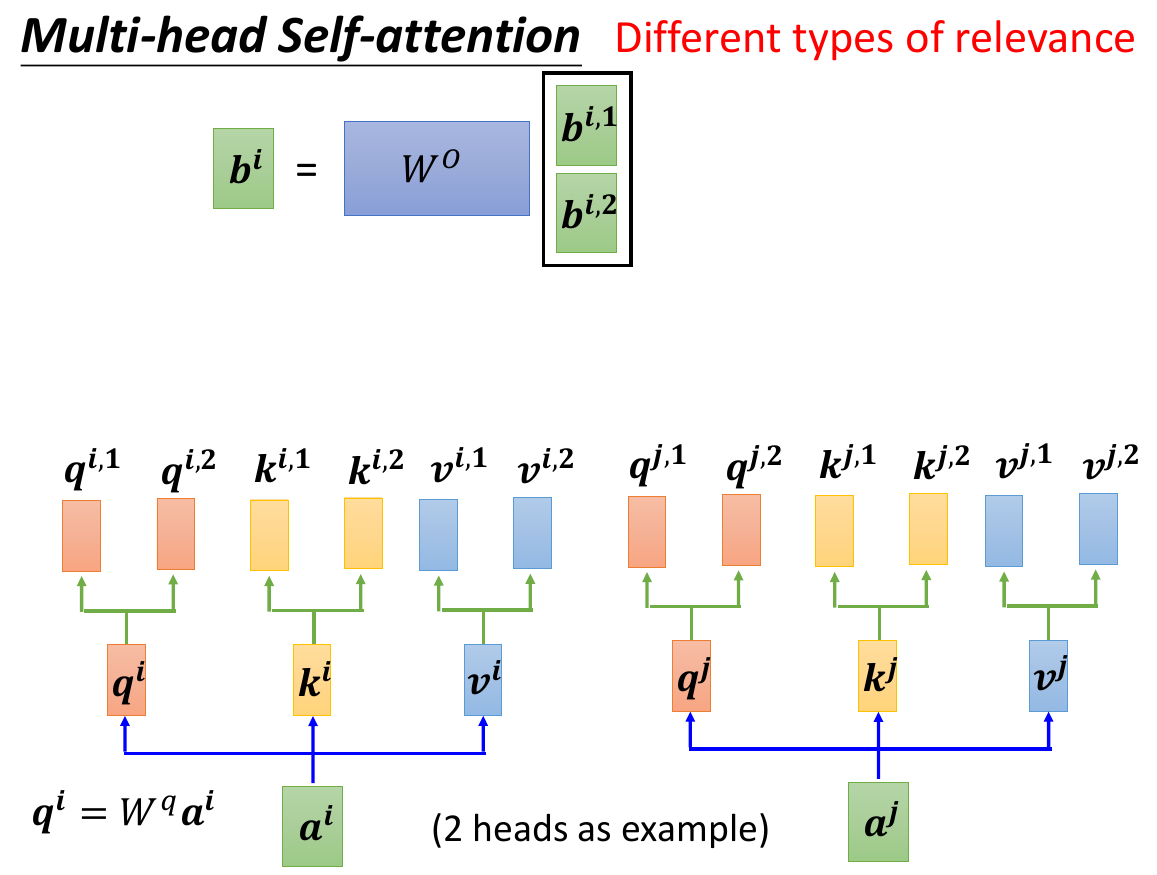
- multi-head
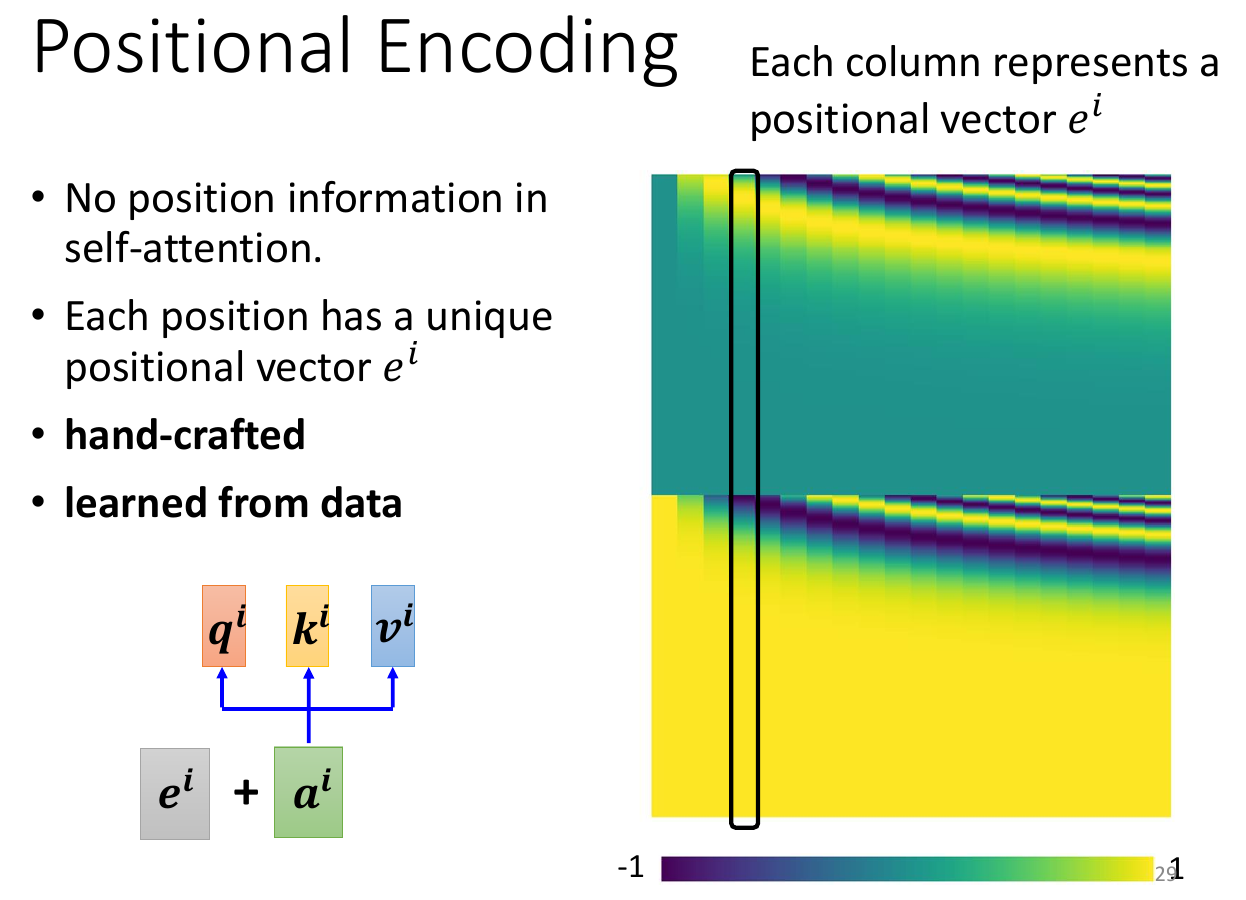
- positional
- normal self-attention is indifferent to position -> add positional vector yourselfof
- truncated self-attention
- not seeing the whole
- speech
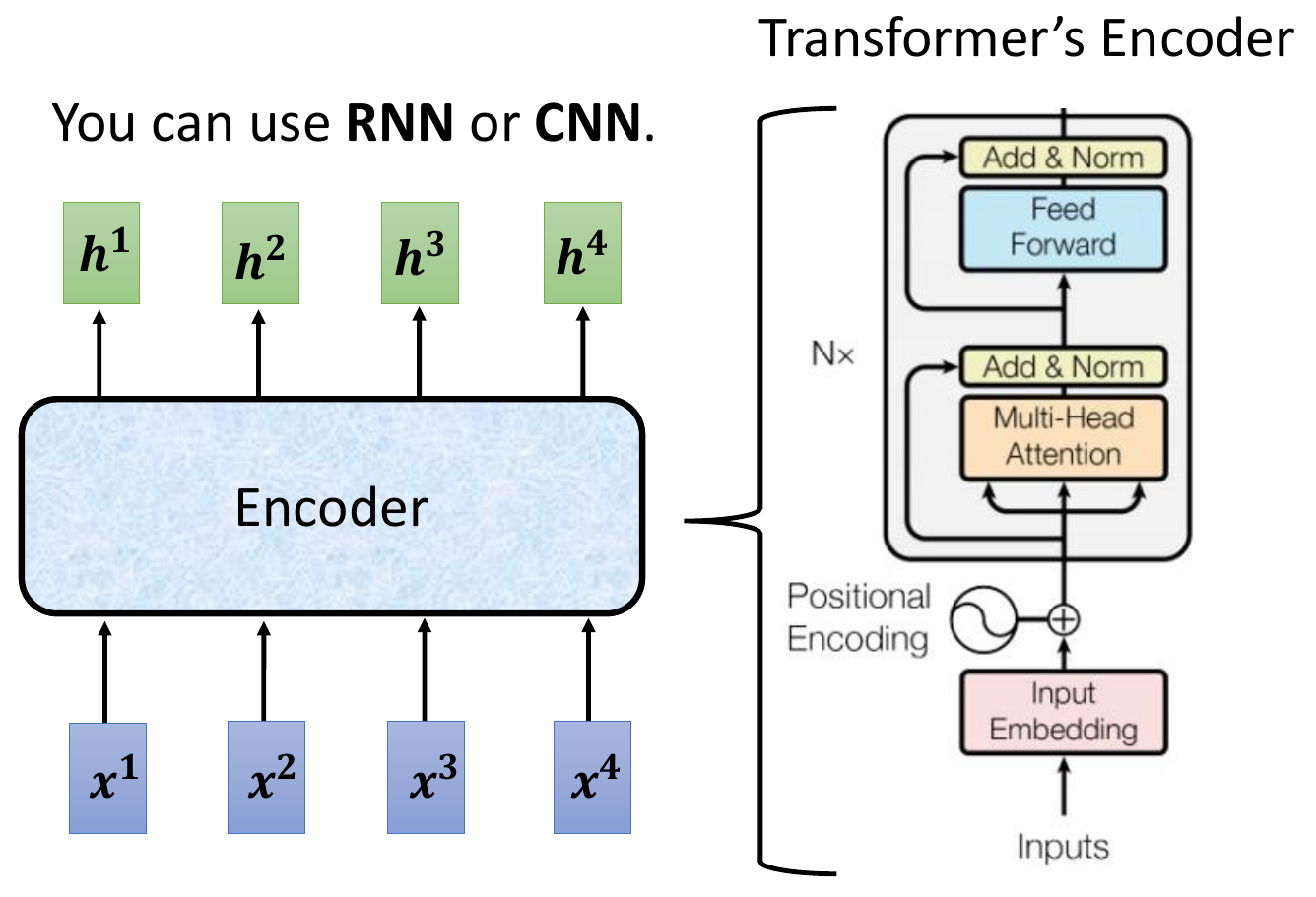
- CNN is a special case of self-attention
- CNN is simplified self-attention (only see receptive field)
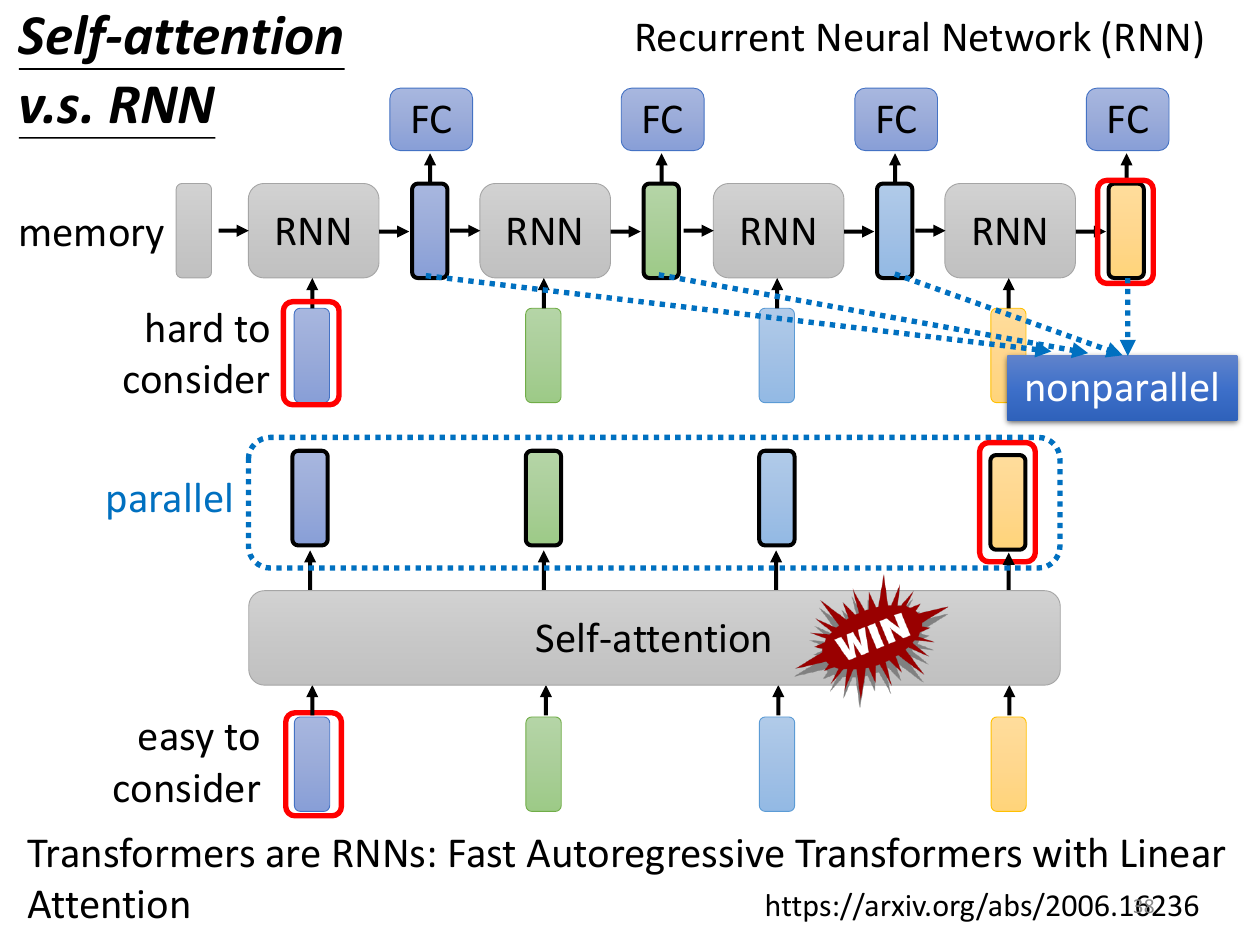
- RNN
- recurrent neural network
- largely replaced by self-attention
- RNN is sequential -> slow
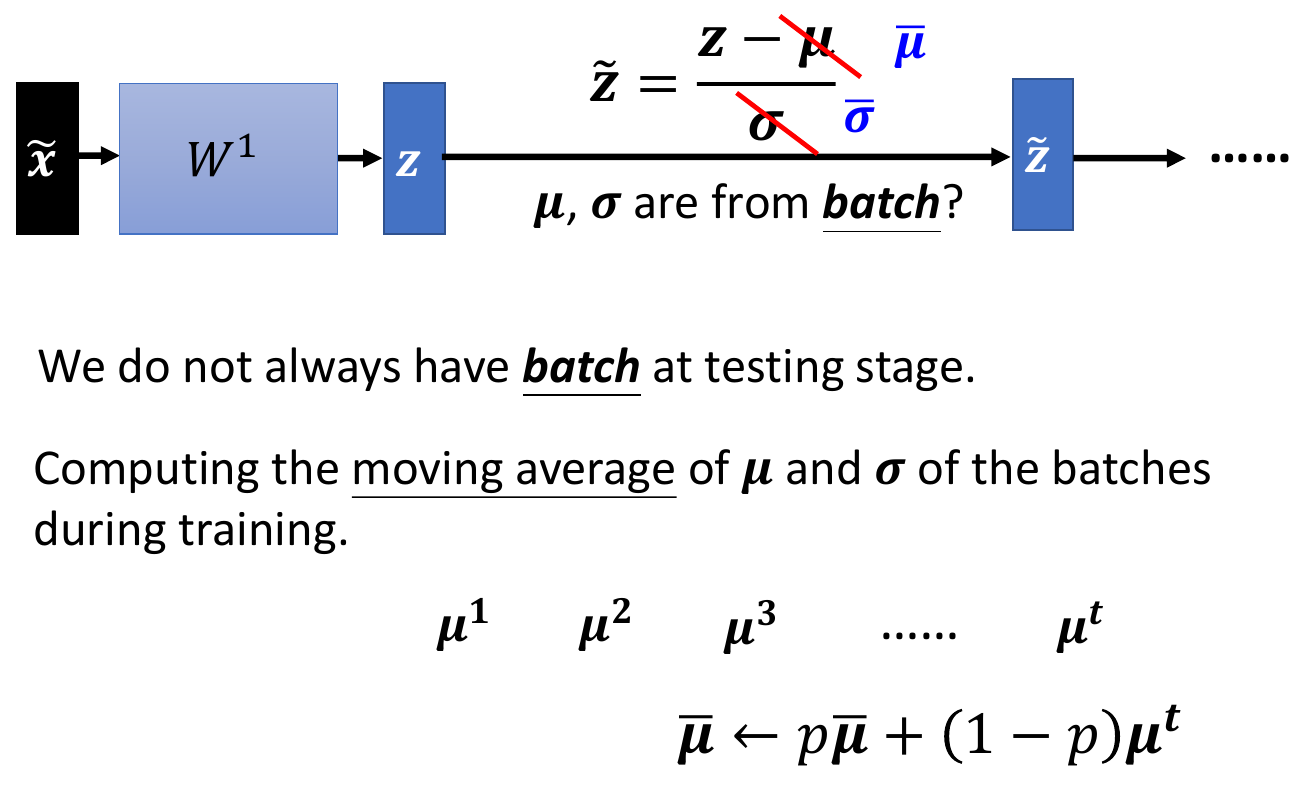
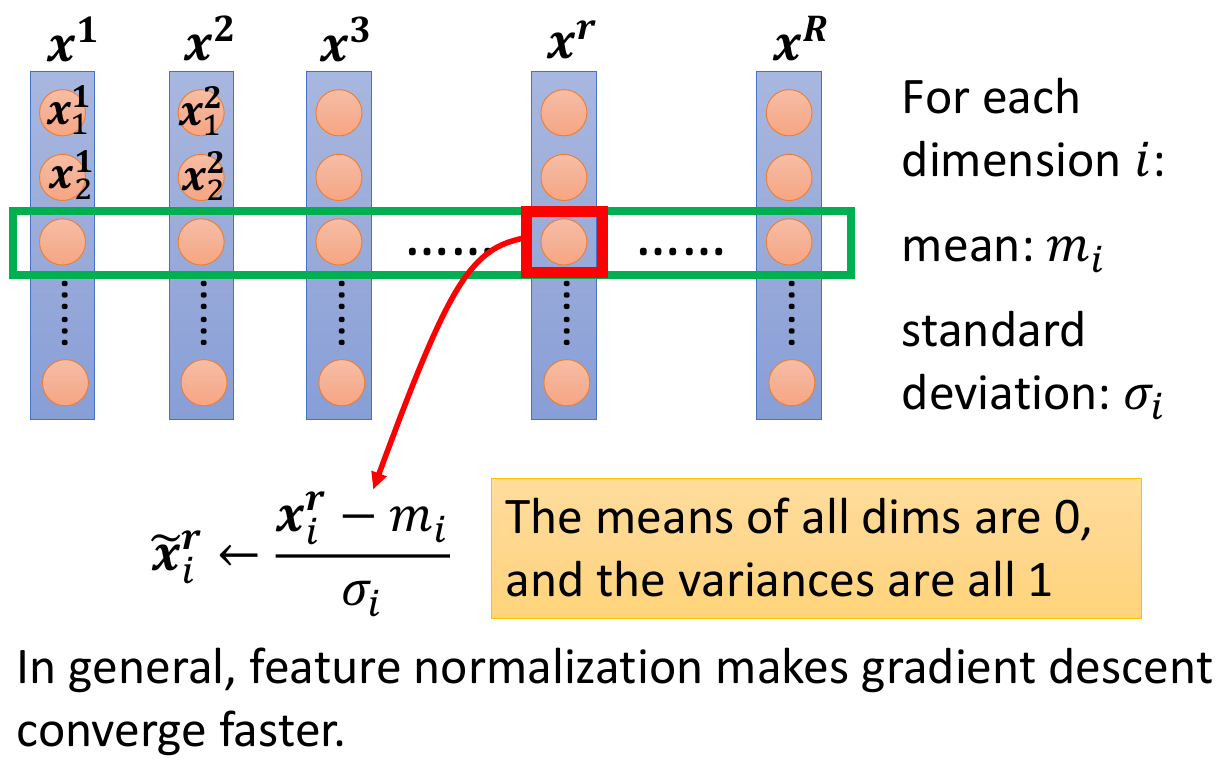
batch normalization¶
- feature normalization
- normalize to mean = 0, variance = 1
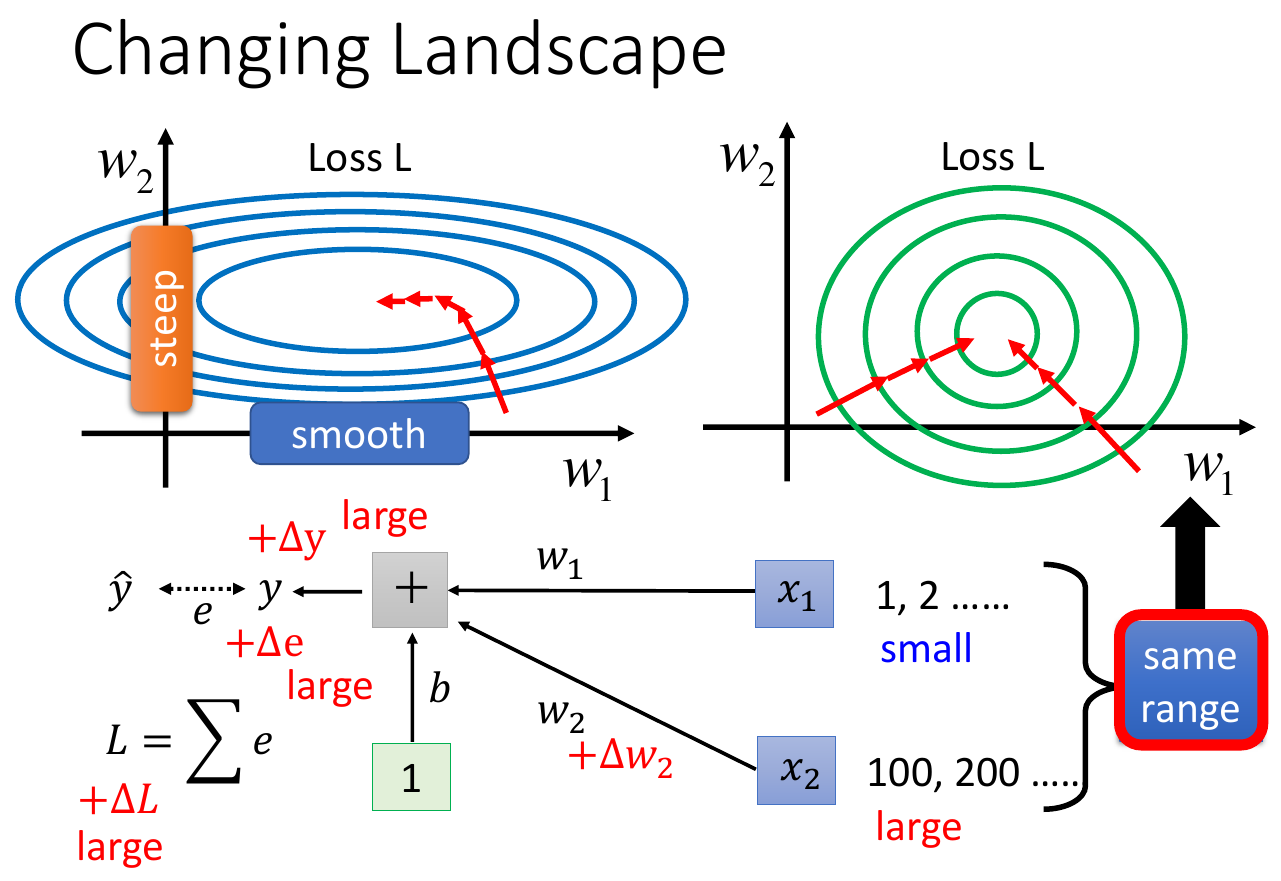
- gradient descent converges faster after normalization
- error surface changed
- normalize to mean = 0, variance = 1
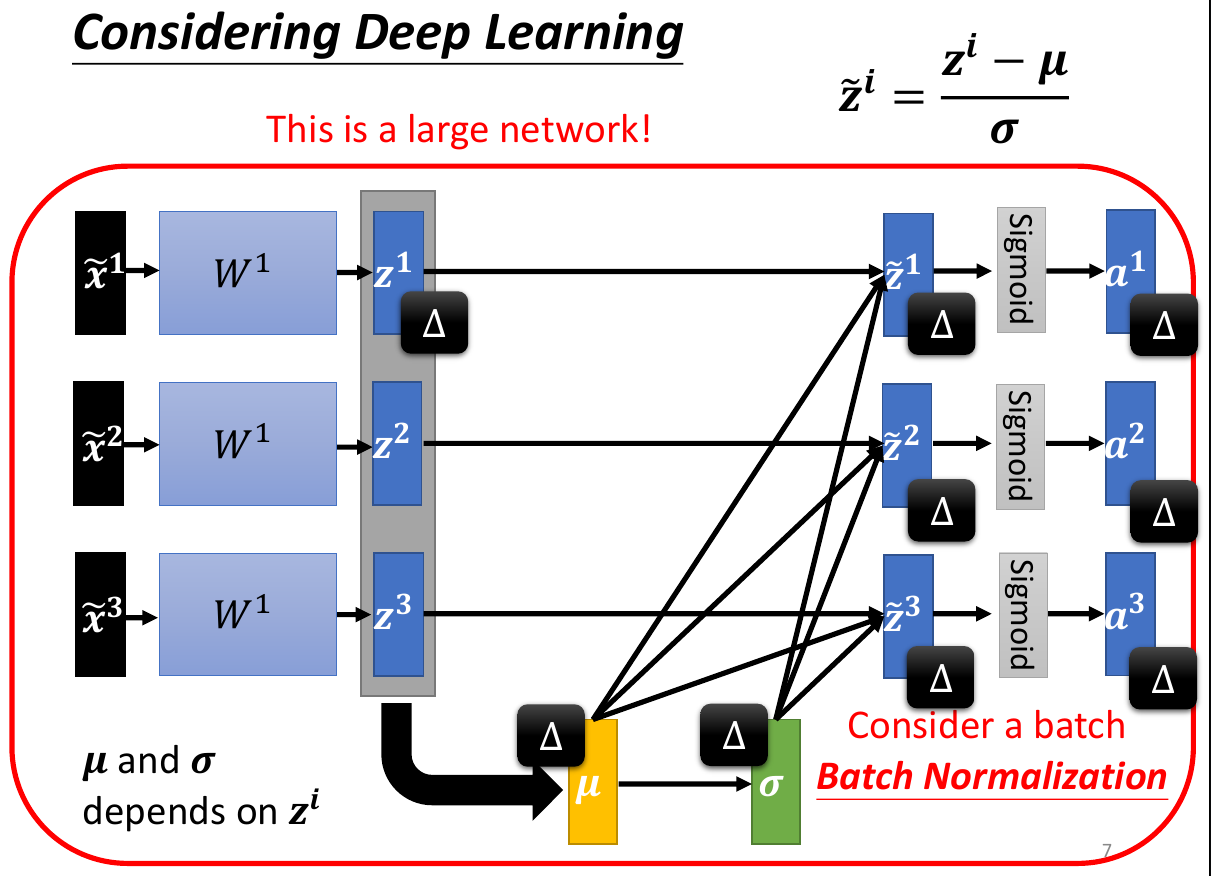
- batch normalization
- 只對一個 batch 做 feature normalization
- at testing, mean and std are calculated on a moving average basis
- otherwise will need to wait for enought data to be able to calculate
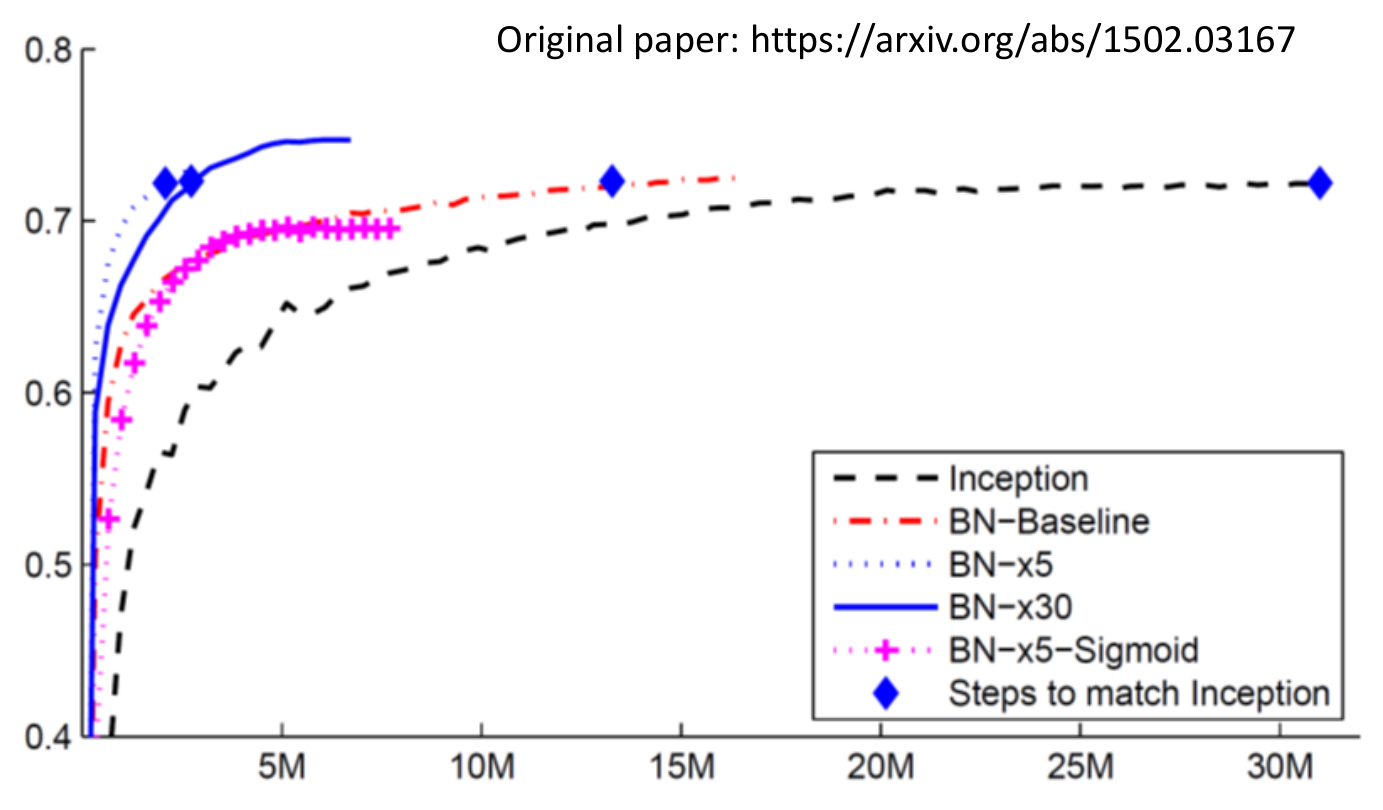
- faster to converge (to the same accuracy)
- 只對一個 batch 做 feature normalization
- batch normalization is one of the many normalization methods
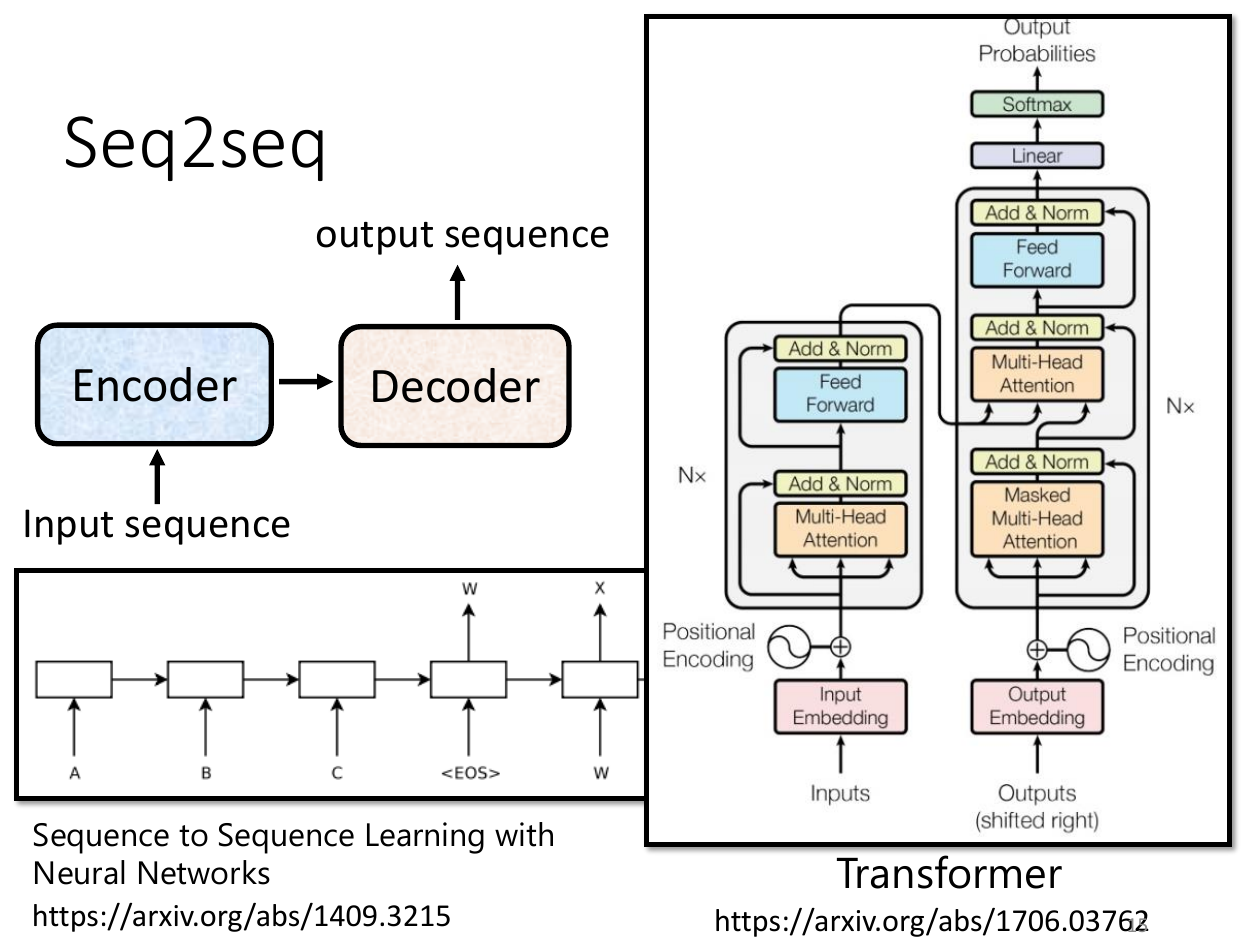
transformer¶
- seq2seq
- input sequence, output sequence
- decide size of output sequence itself
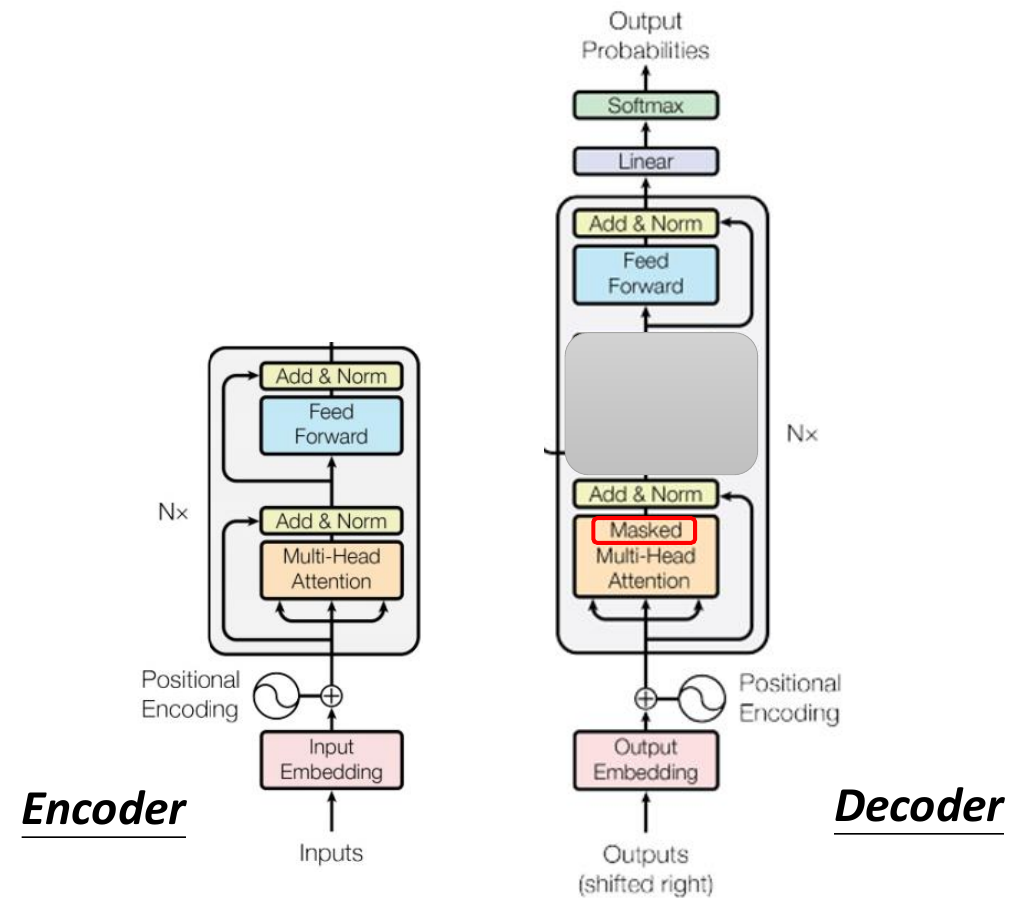
- architecture
- encoder
- decoder
- minimize cross entropy
- teacher forcing
- give decoder correct value to teach it
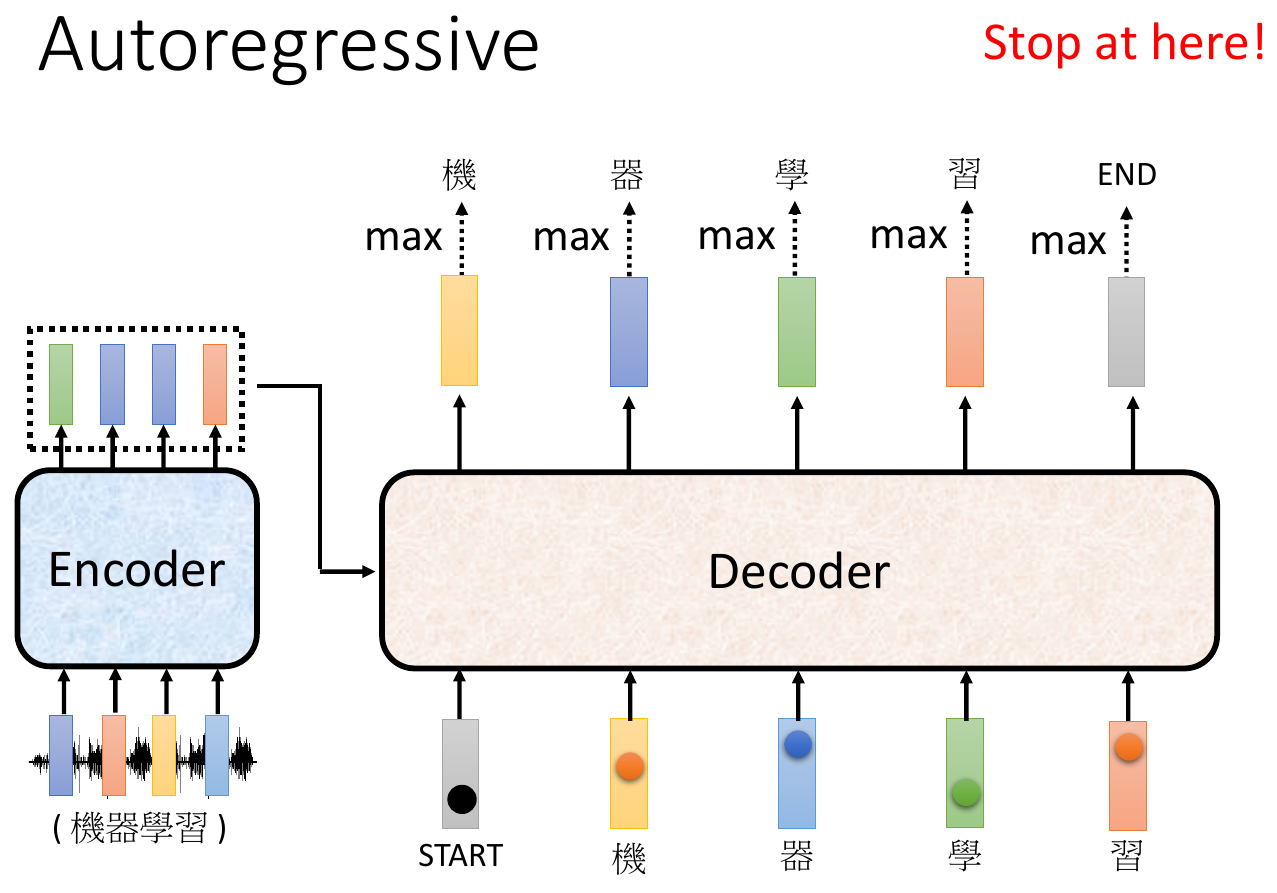
- a "Begin of Sentence" one-hot vector
- output a stop one-hot vector -> terminate
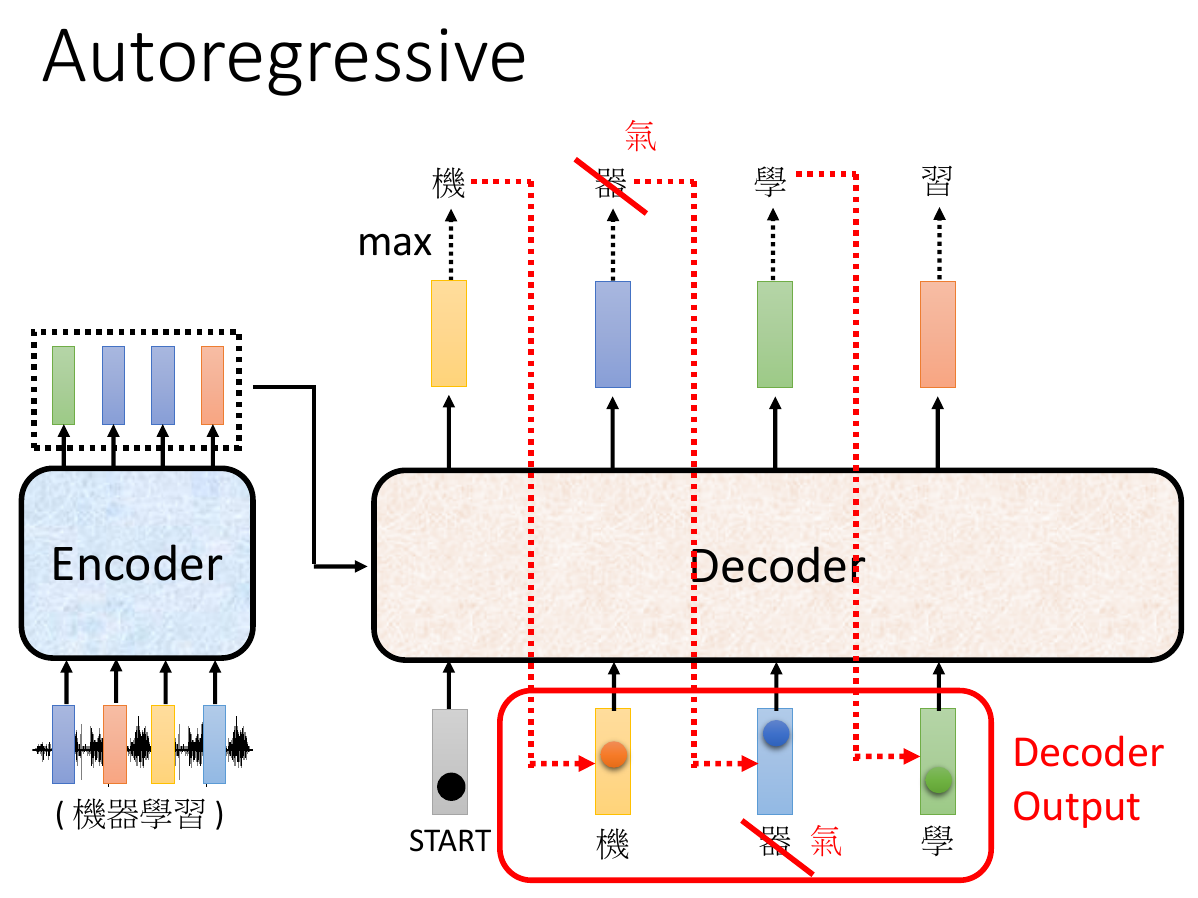
- AT, autoregressive
- take previous output as input (like RNN)
- error may propagates
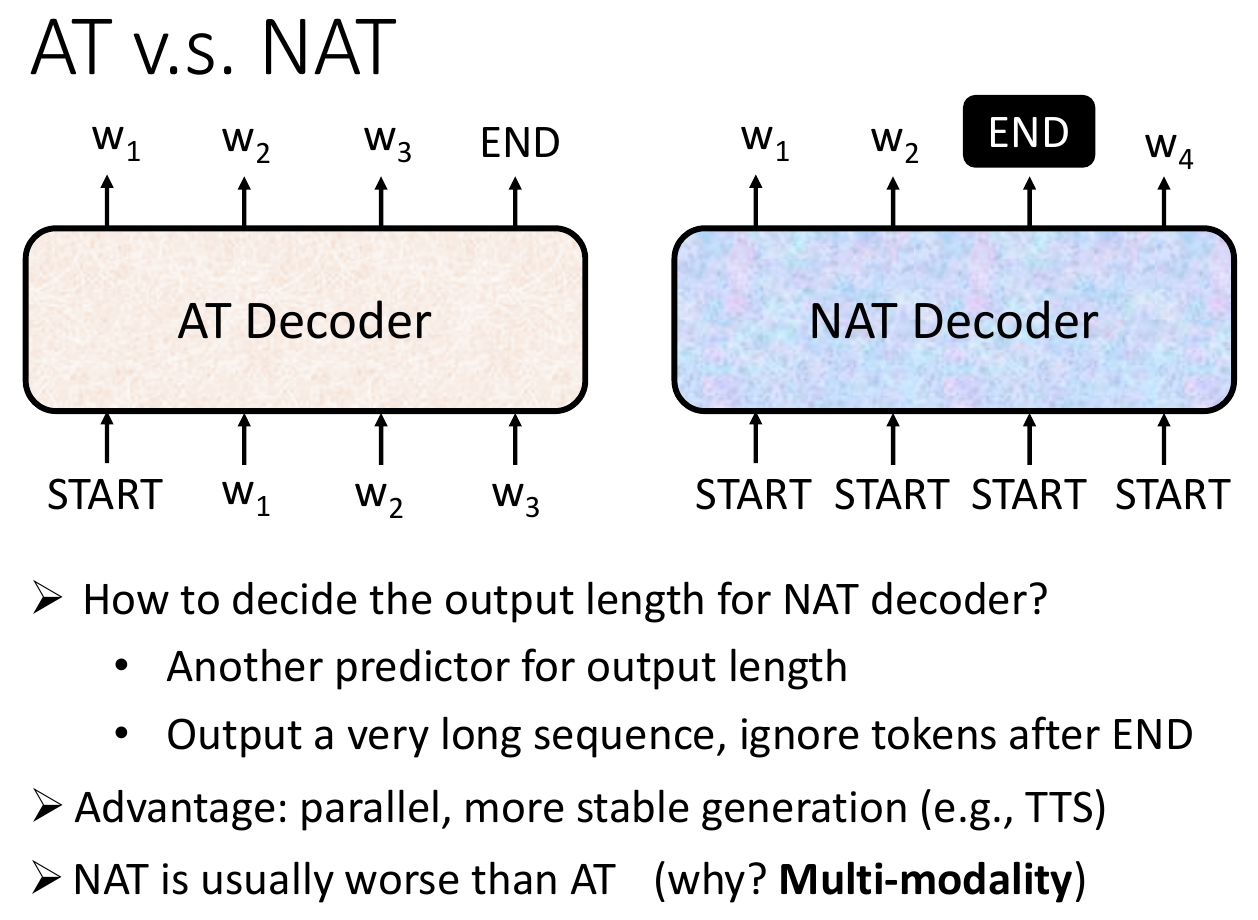
- NAT, non-autoregressive
- parallel
- decoder performance worse than AT
- seq2seq usage
- multi-label classification
- decide hoe many class itself
- object detection
- multi-label classification
- copy mechanism
- pointer network
- able to copy a sequence from input and output
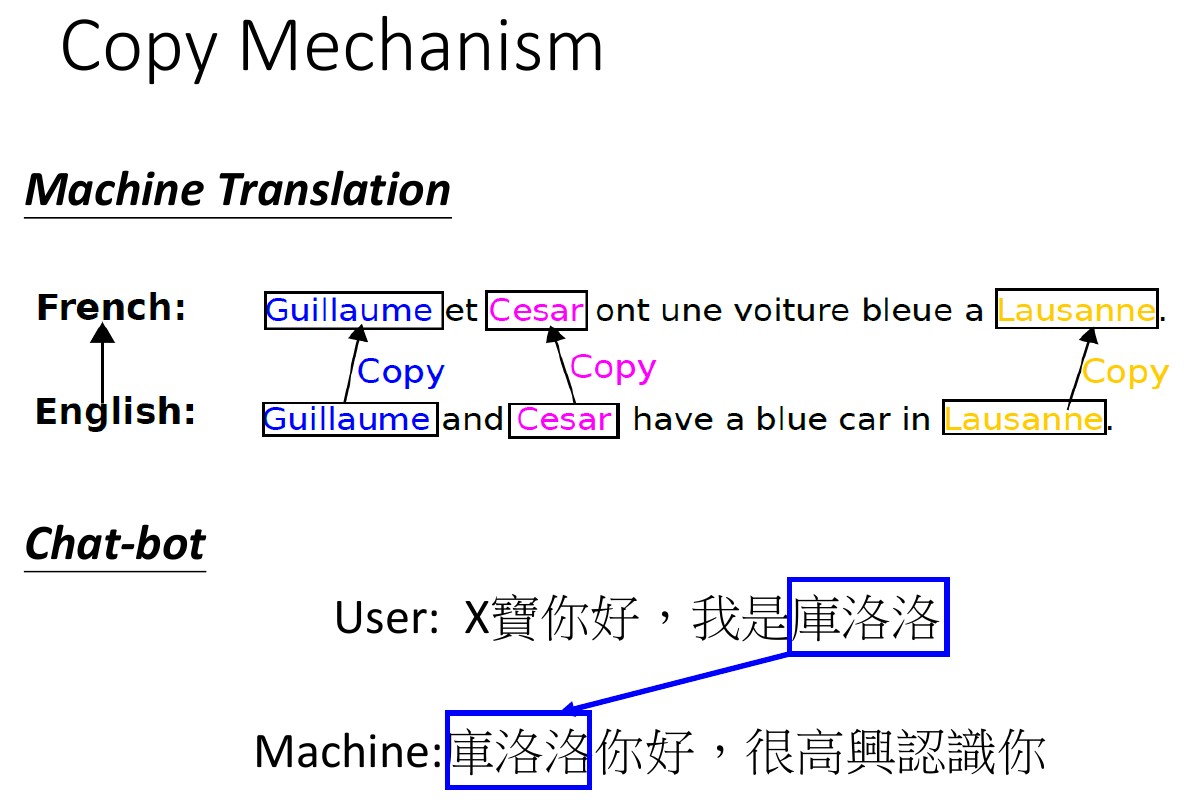
- summarization
- guided attention
- force training in certain way
- e.g. force left to right
- force training in certain way
GAN¶
- generator adversarial network
- generator
- input a vector, output an image
- maximize the score of discriminator
- discriminator
- a neural network output a scalar, indicating the realness of the input
- using classification
- real images = 1
- generated images = 0
- using regression
- real images -> output 1
- generated images -> output 0
- generator generates image, while discriminator finds out the difference between the real images and and ones from generator
- both learn improve in the process
- algorithm
- 交替 train
- fix generator, train discriminator
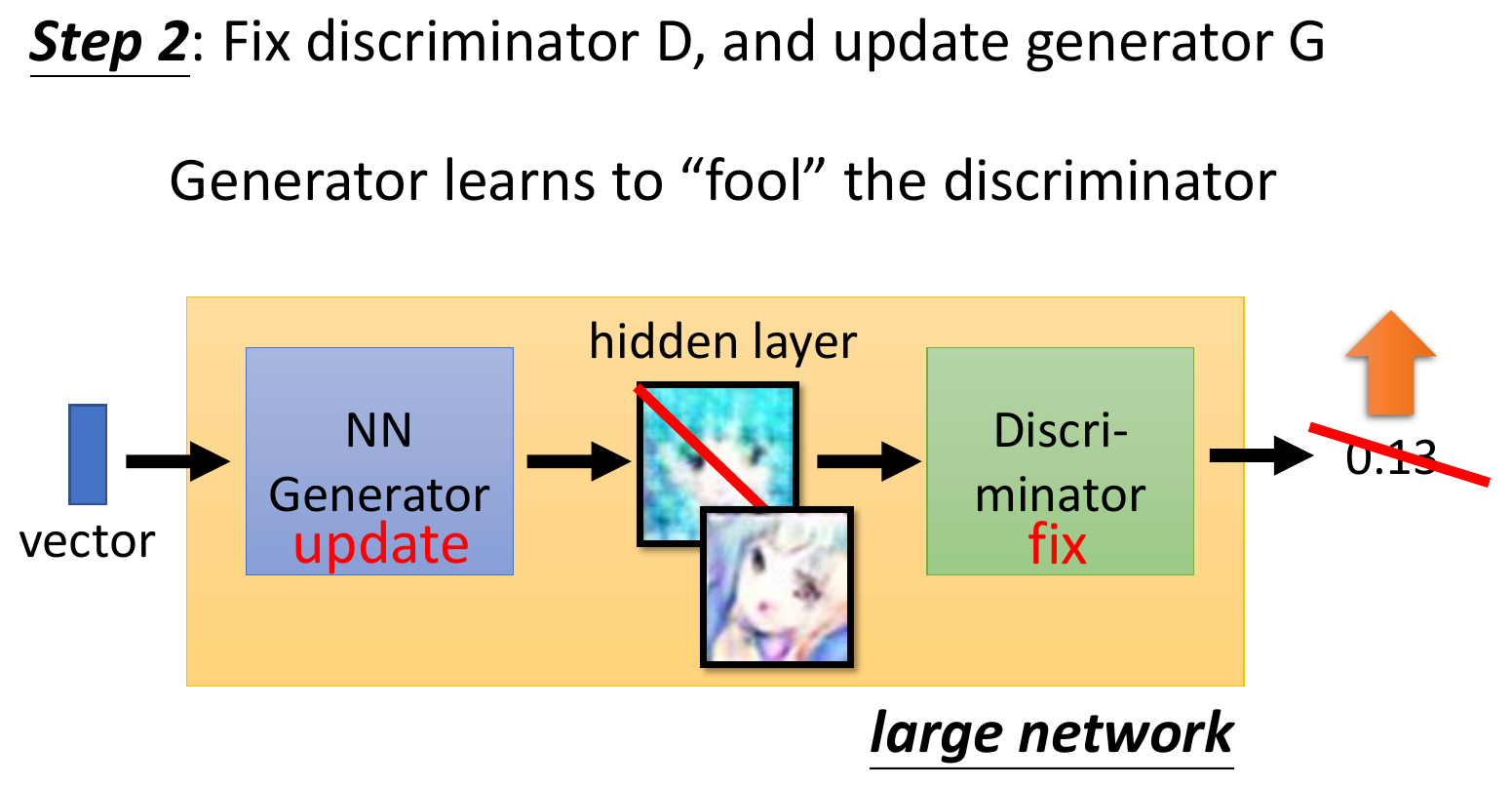
- fix discriminator, train generator
- concat generator & discriminator but only update the parameters of generator
- 交替 train
- theory
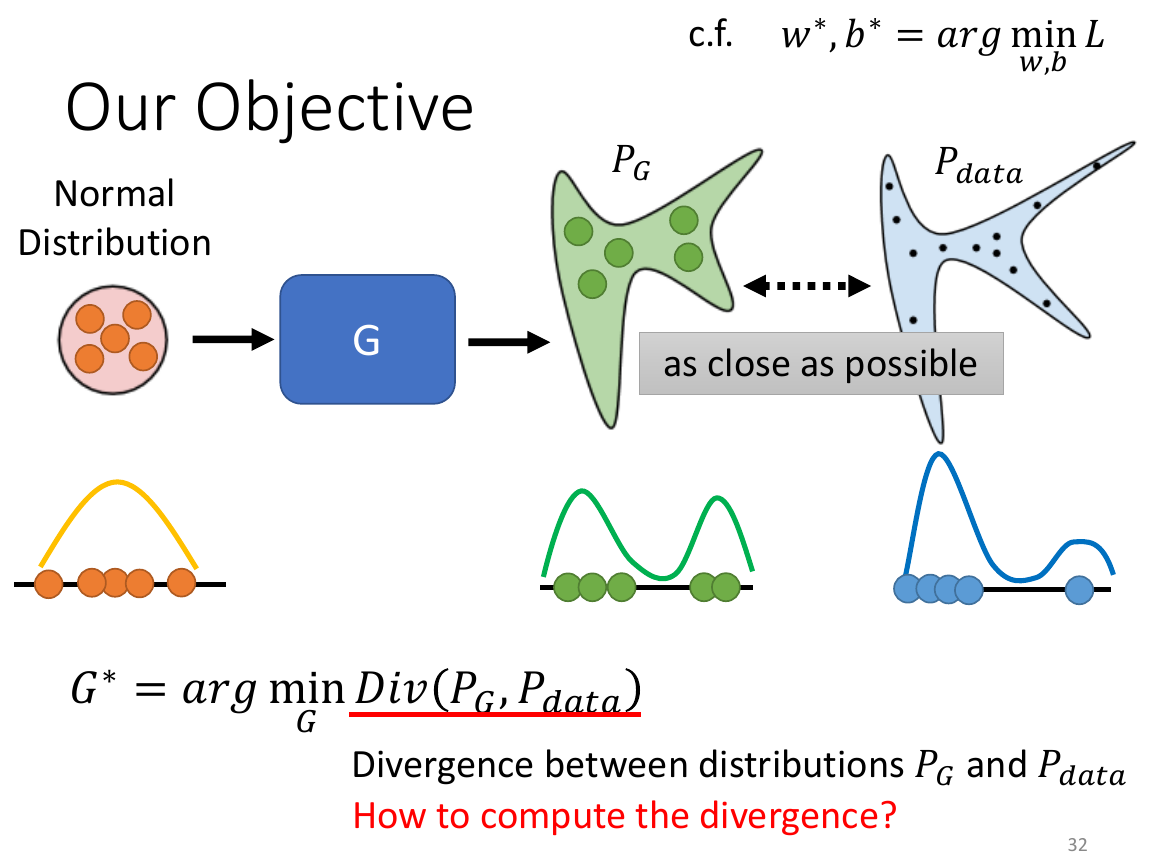
- minimize the divergence
- difficult to train
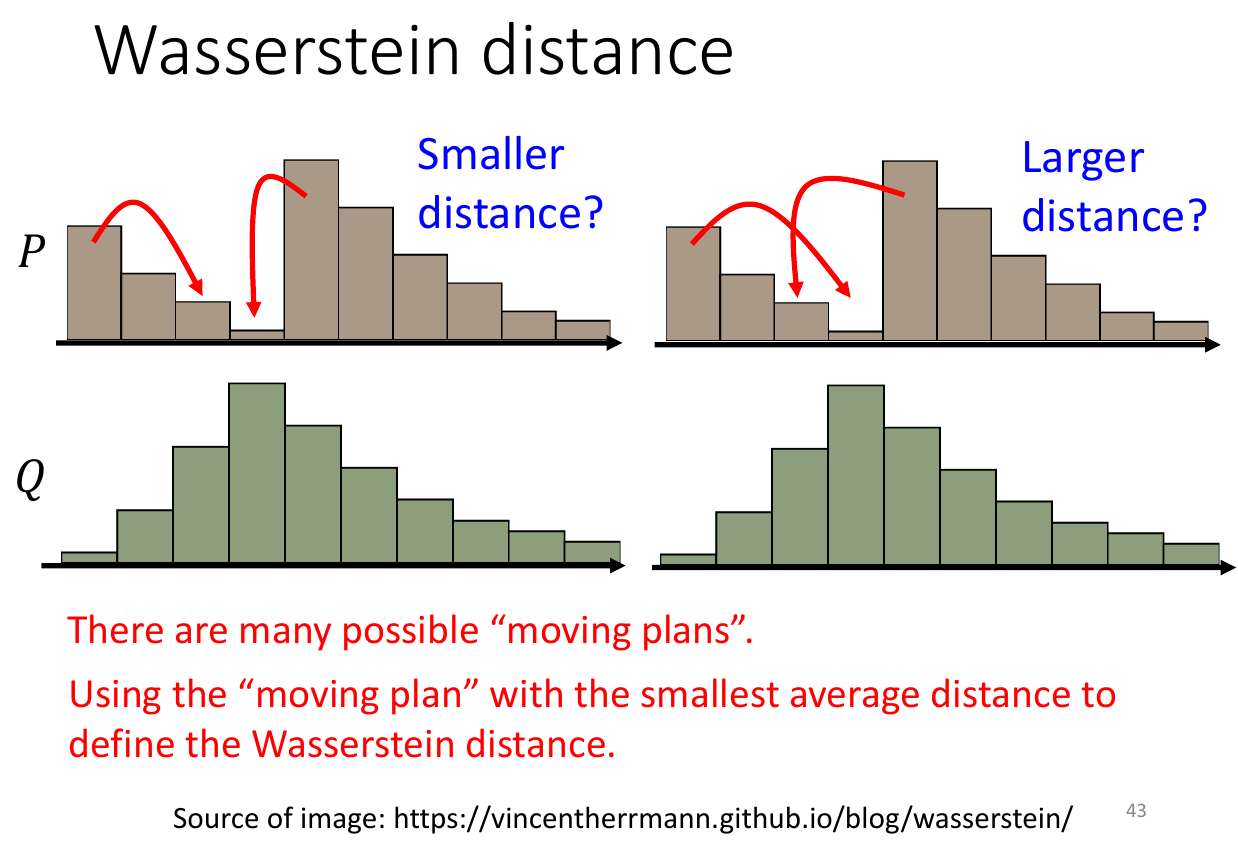
- Wasserstein distance
- min overhead needed to transform a distribution to another
- minimize the divergence
Auto-Encoder¶
- autoencoder & variational autoencoder
- self-supervised
- no need label
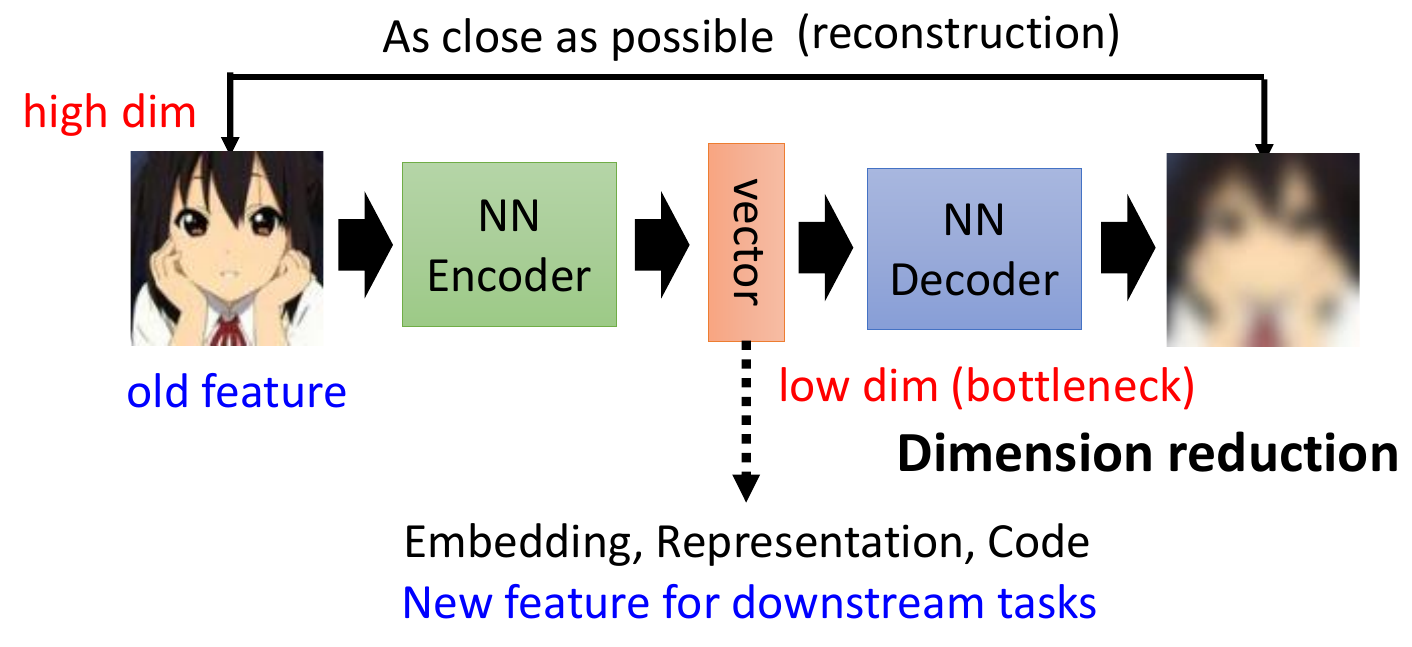
- encode high dim thing into low dim -> bottleneck
- decide low dim back to high dim
Explainable AI¶
Lime¶
- show the part of the image the model used to classify
- green -> positive correlation red -> negative correlation
- slice an image into many small parts, turn each on/off, and see the output change
- like Econometrics
- references
Saliency Map¶
- heatmap of the importance of pixels to the classficiation result
- visualization of the partial differential values of loss to input tensor
- reference
Smooth Grade¶
- add random noisy and generate saliency map
Domain Adaptation¶
- adapt a model into a different domain
- e.g. similar but different form of data
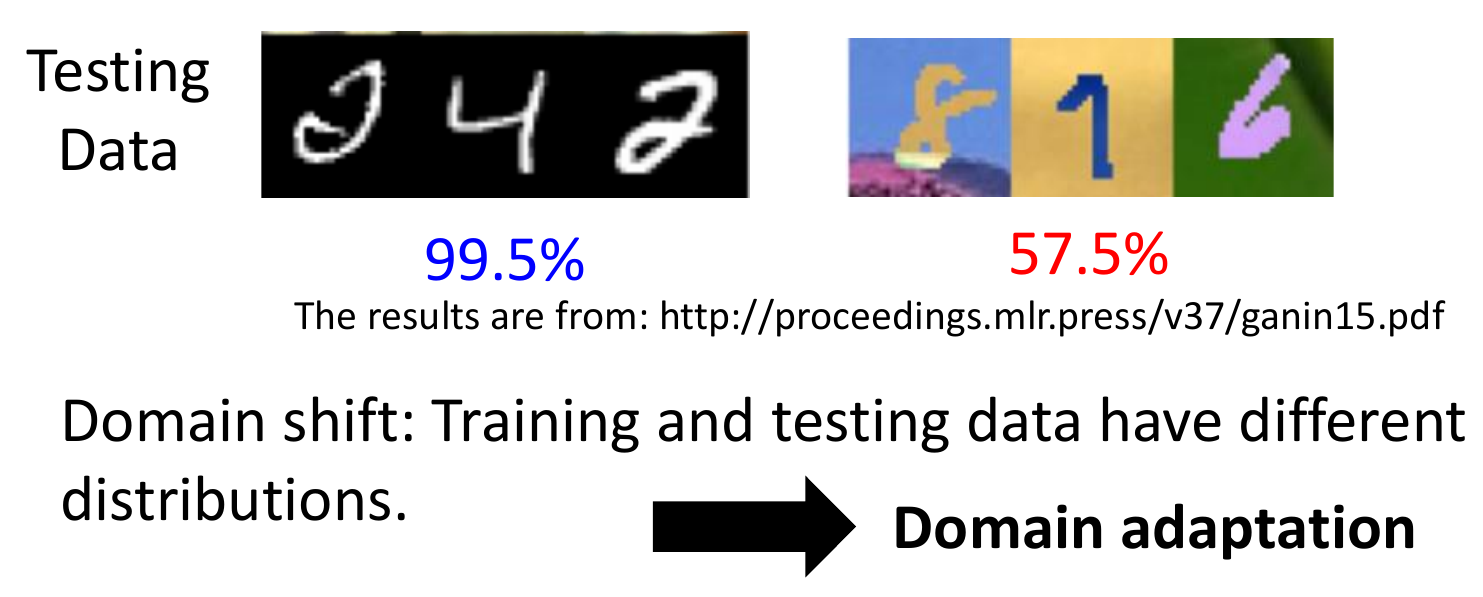
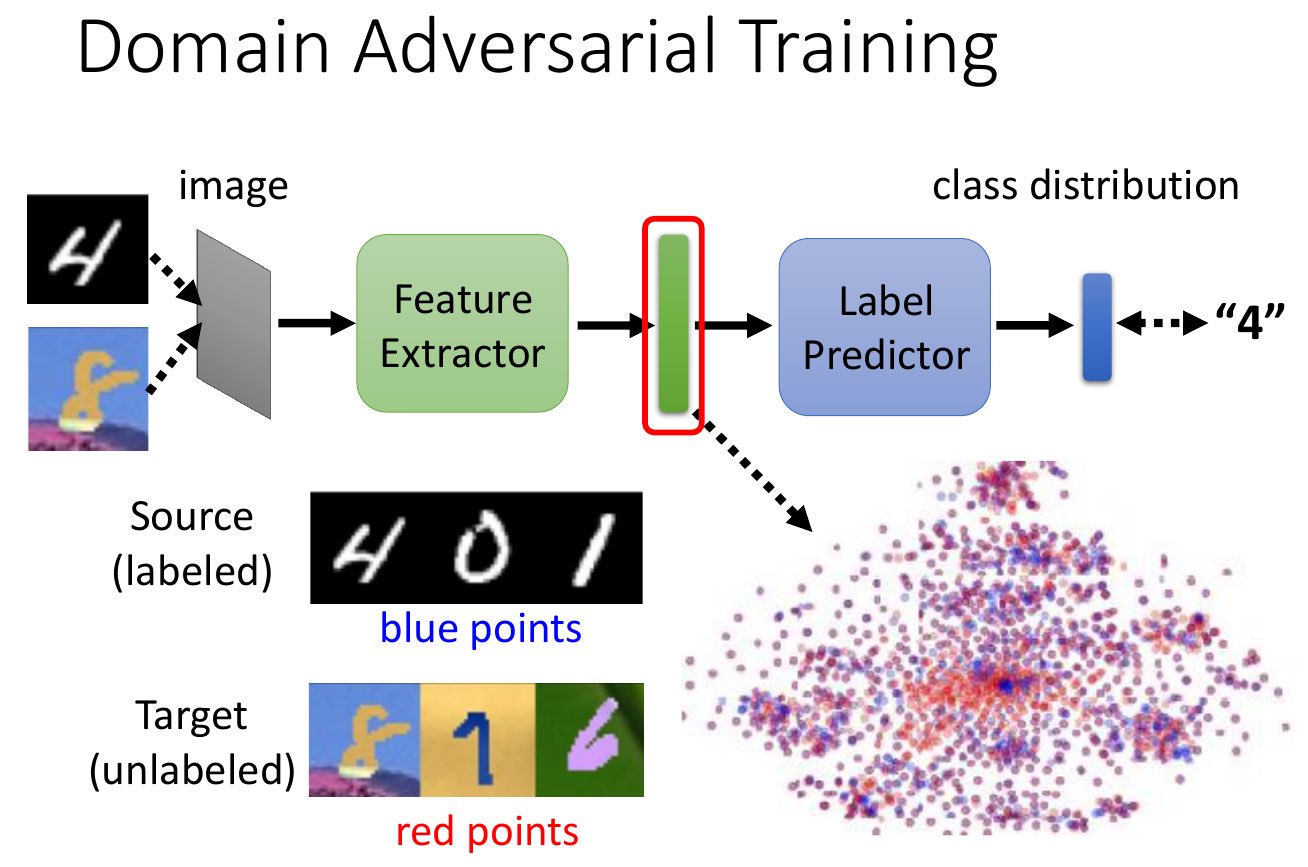
- use feature extractor to extract the key features
- goal: feature extracted from source == from data
- use label predictor to predict the class from the extracted features
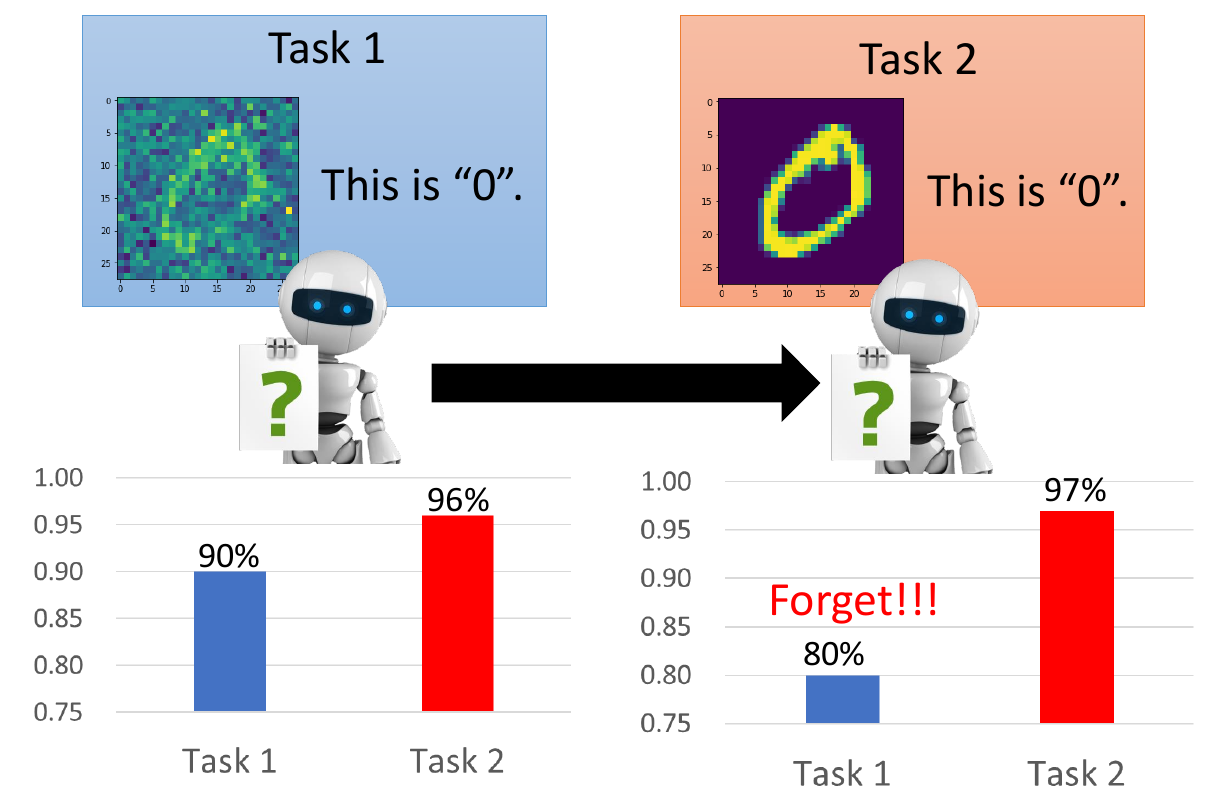
Life Long Learning¶
- learn new tasks continuonsly
- can be new sets of data, new domains, etc.
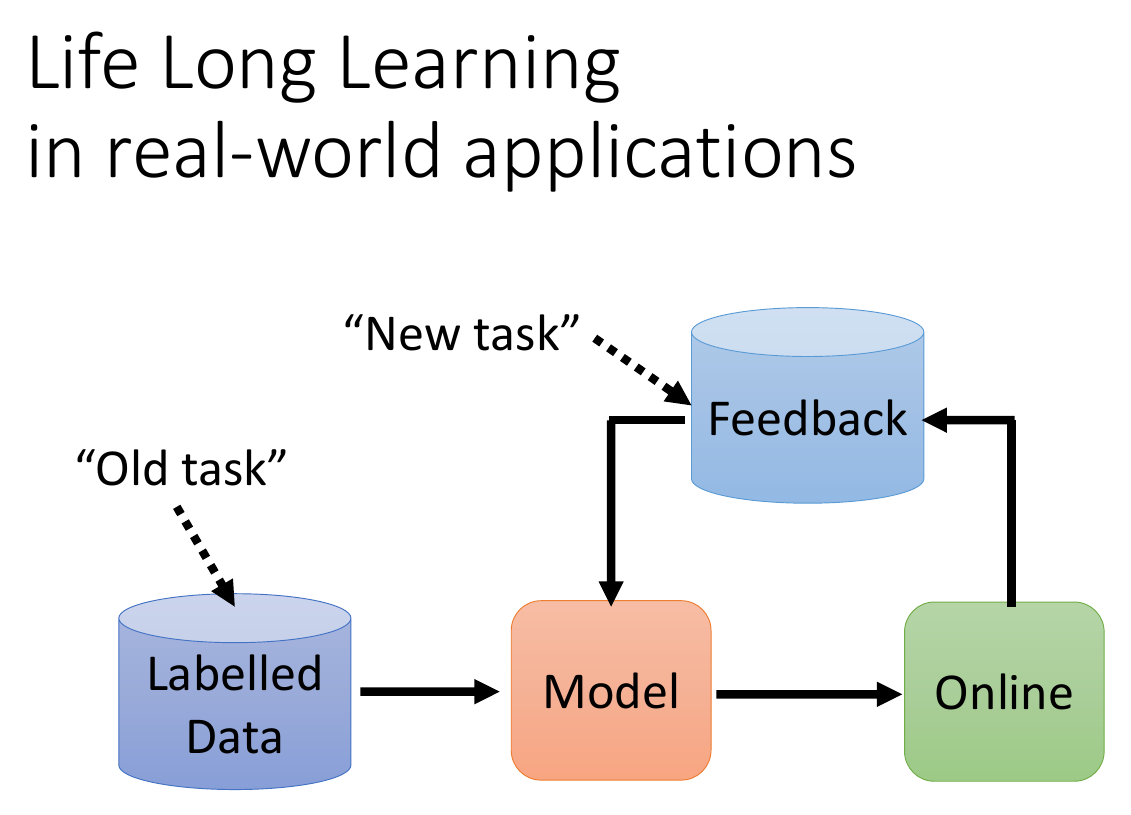
- can't learn multiple tasks sequentially - catastrophic forgetting
- but can learn multiple tasks simultaneously - multi-task learning
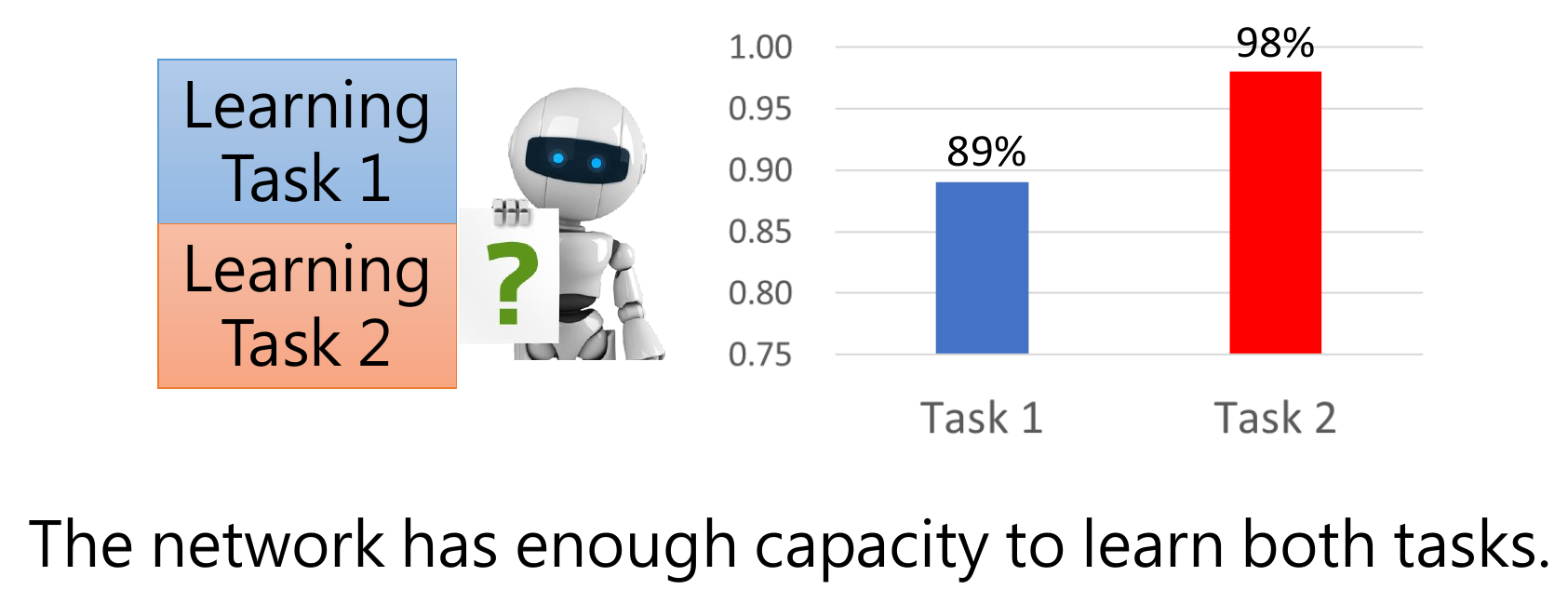
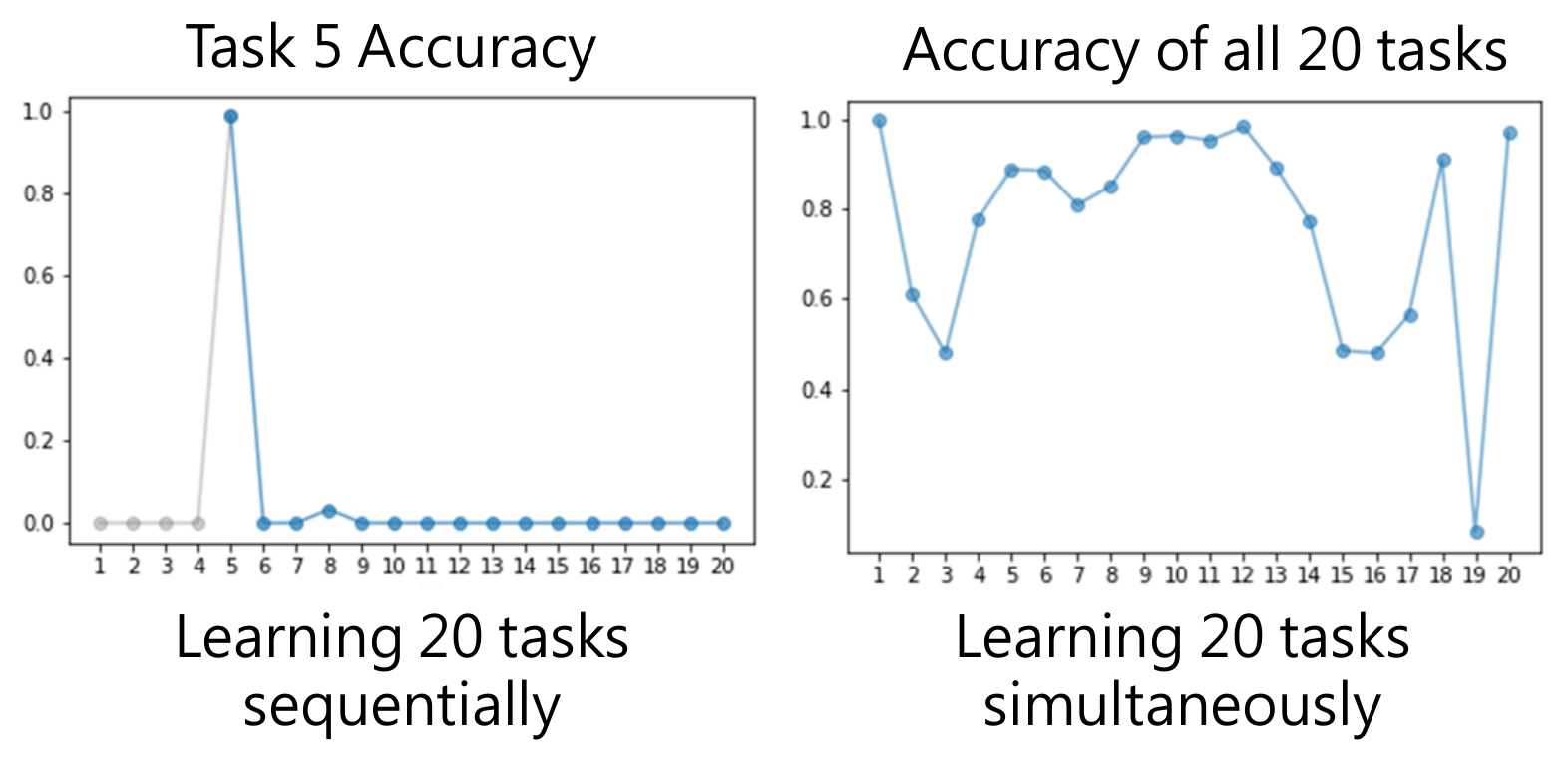
- not practical
- need to store all the task data
- need extreme computation
- upper bound of life long learning
Q Learning¶
- components
- state
- action
- reward
- maximize future cummulative expected payoff
Bellman equation¶

- \(\alpha\) = learning rate
- \(\gamma\) = discount rate
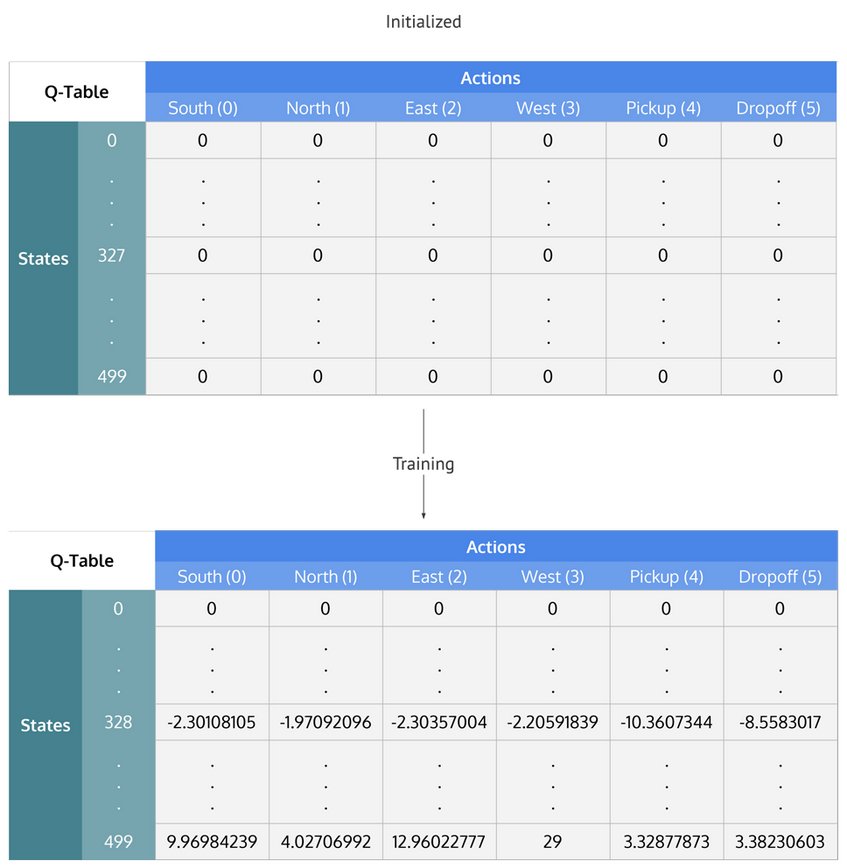
Q Table¶
If represent each state & each action as an interger
- row & column = state & action
- cell value = q value = discounted future total rewards
- iterate and update cell values (like dp)
- given a state -> choose the action resulting to greatest q value -> update cell value & go to new state
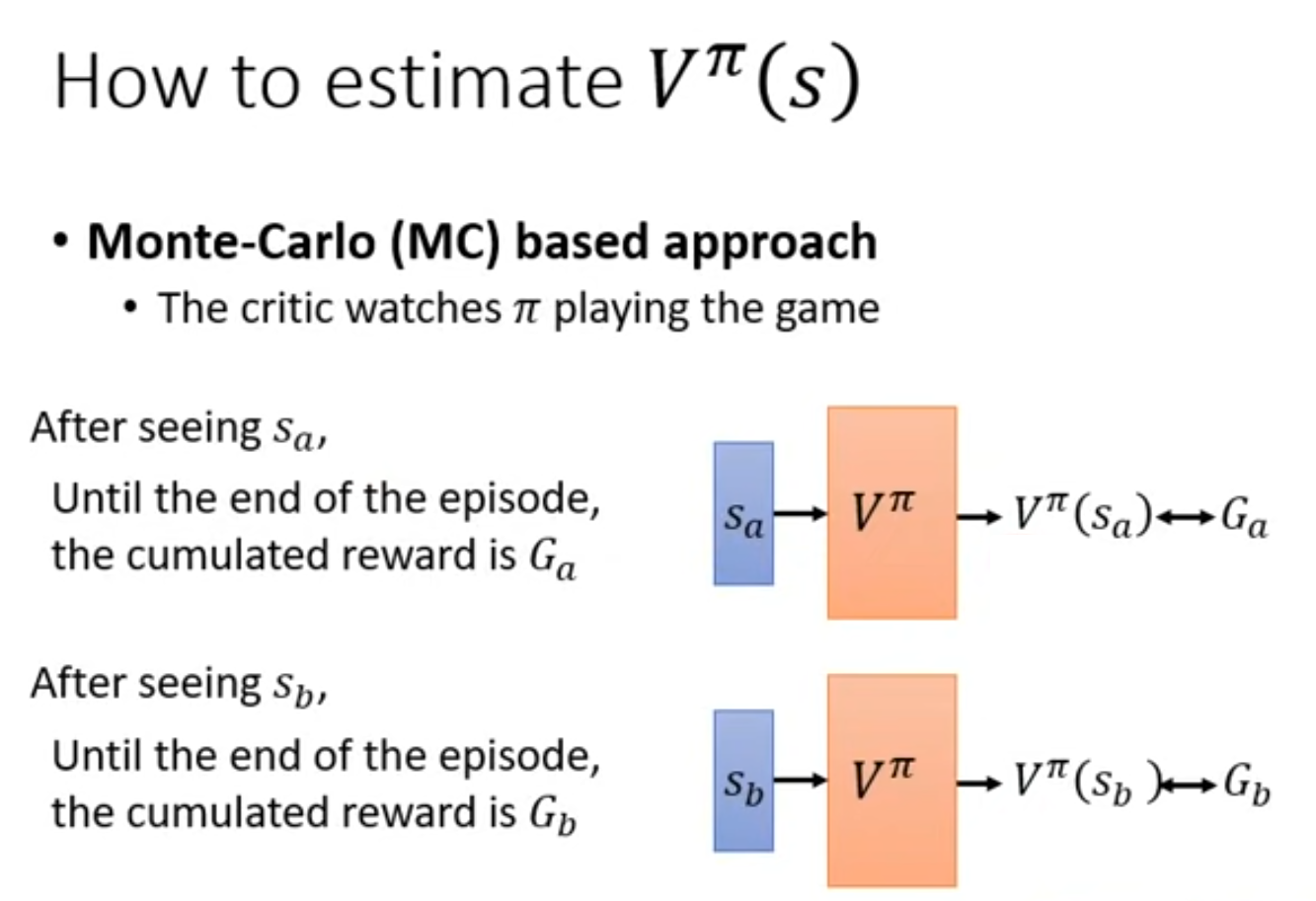
Monte-Carlo (MC)¶
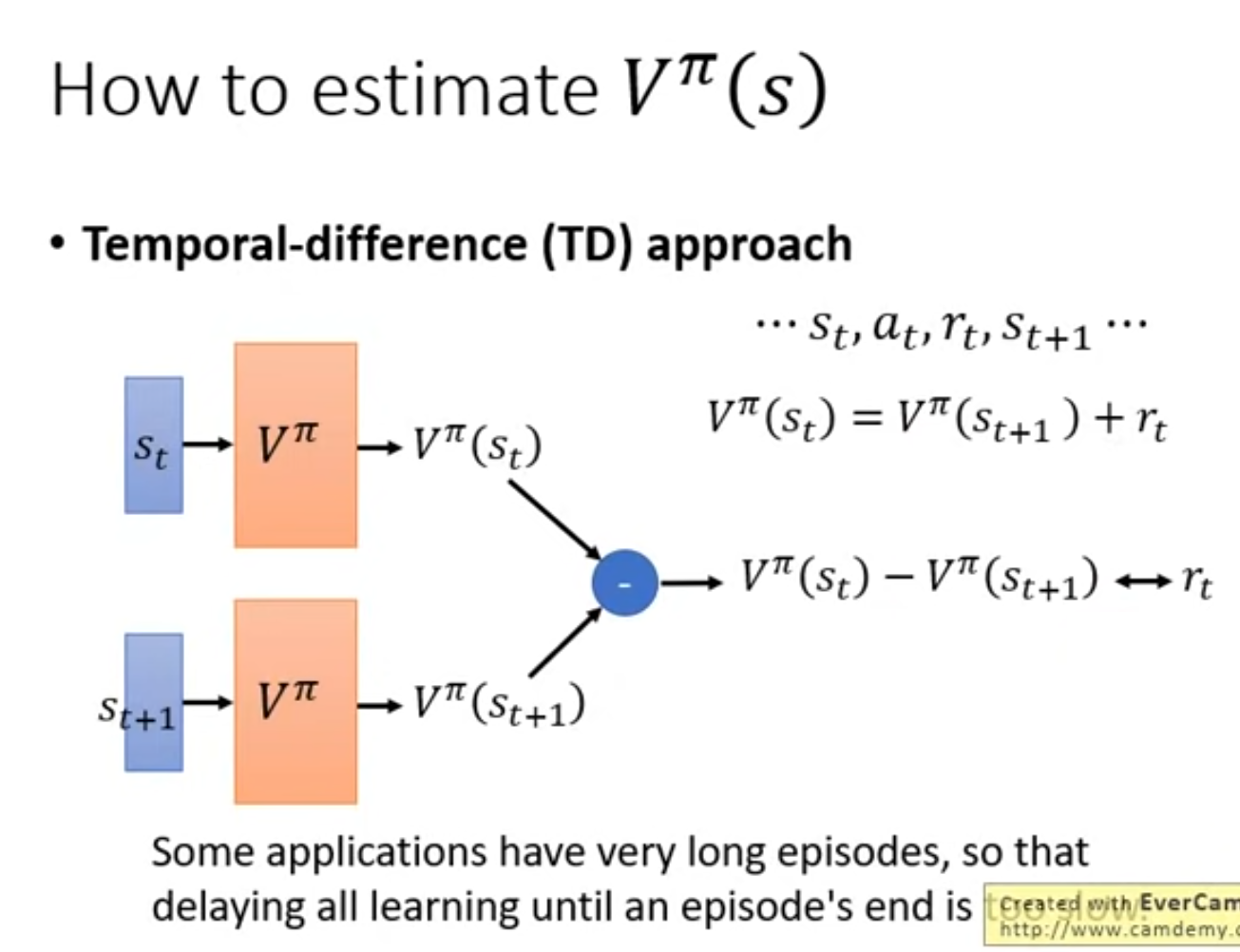
Temporal-difference (TD)¶
\(V^{\pi}(s_{t+1})\) = 下個 action 之後的 cummulative expected payoff = 現在 action 之後的 cummulative expected payoff - 這次的 reward
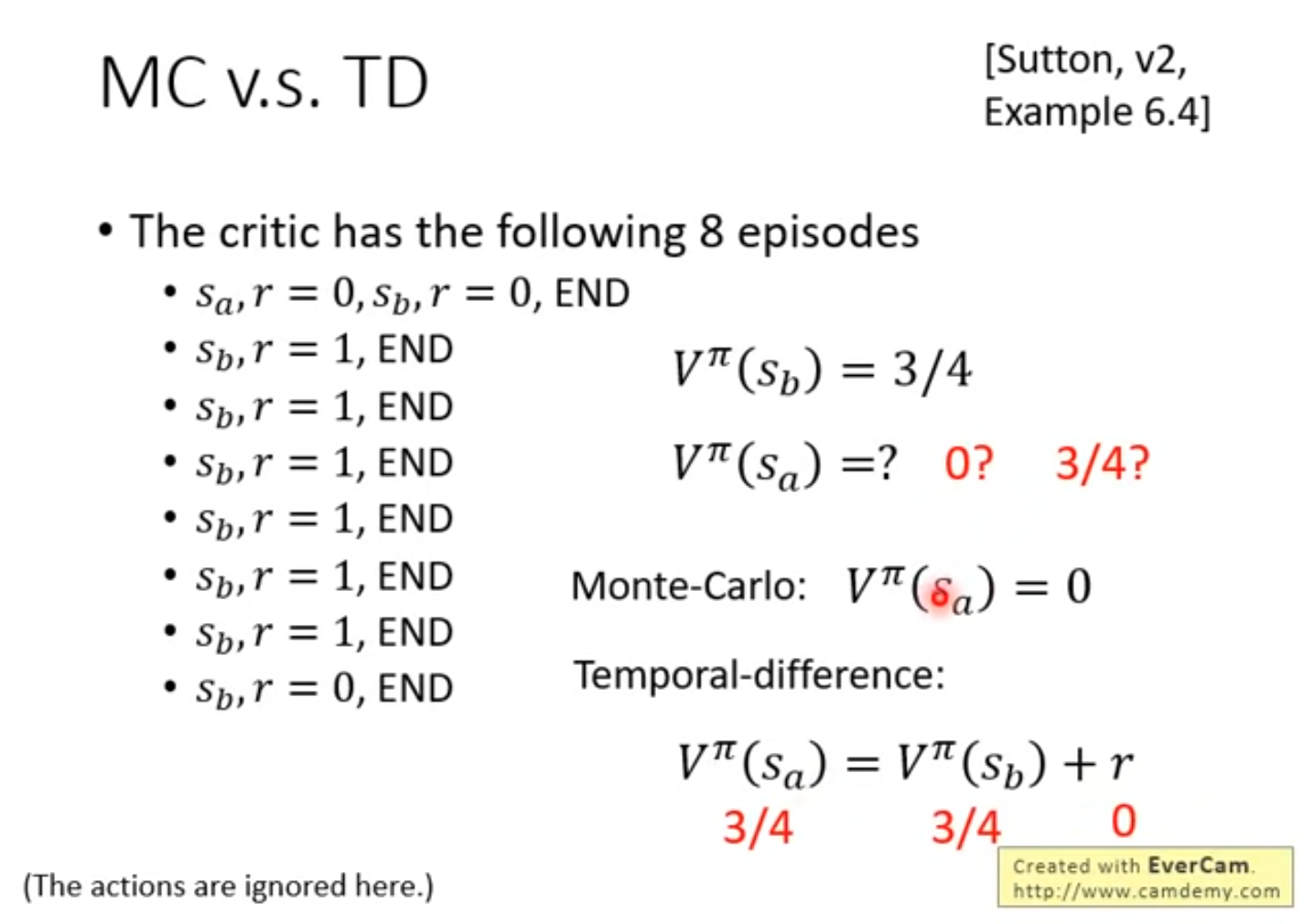
MC vs. TD¶
Deep Q Learning¶
https://towardsdatascience.com/2a4c855abffc
Q Learning but replace Q table with neural network
- input: state
- output: action -> reward
Still need to update Q value with Bellman equation